iPad(ブラウザ)とRaspberry Pi 3+Webカメラで遠隔操作するタミヤのタンクを作る ①材料編
iPad(ブラウザ)とRaspberry Pi 3+Webカメラで遠隔操作するタミヤのタンクを作る ②組み立て編
iPad(ブラウザ)とRaspberry Pi 3+Webカメラで遠隔操作するタミヤのタンクを作る ③プログラム編
さて、前回そろえた材料を開封して、さっそく組み立てていきましょう!
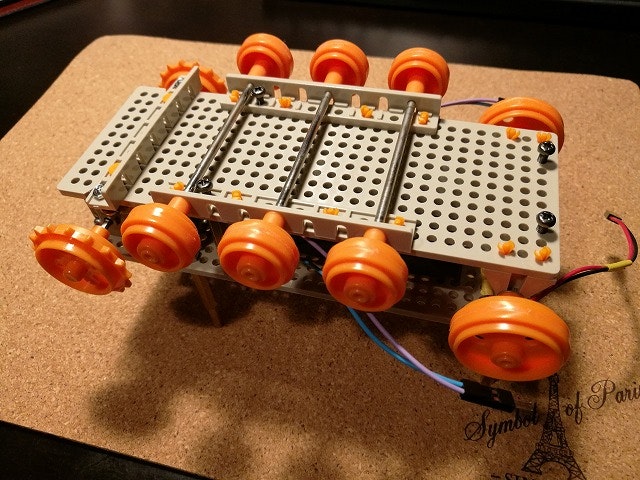
ボディの底とタイヤ
まず、タミヤのユニバーサルプレートとトラック&ホイールセットを開封して、説明書を見ながら下の写真の状態まで組み立てます。

裏側はこんな感じ
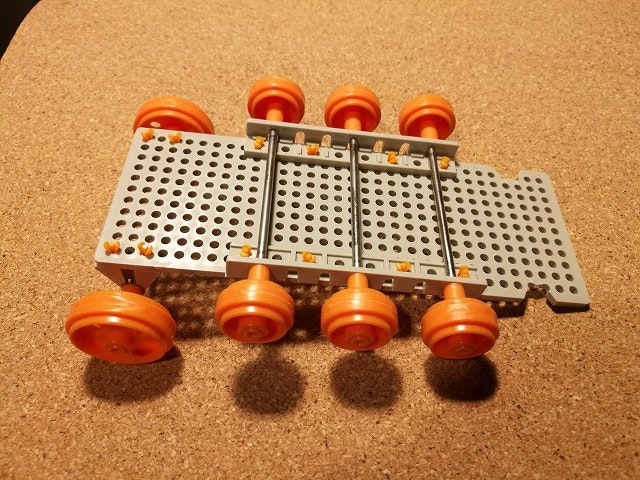
右の方の欠けている部分は、ペンチやニッパーを使って少し削り取っておきます。
ユニバーサルプレートは比較的やわらかいので、ペンチやニッパーを使えばわりと簡単に切ることができます。高いニッパーを使うのがもったいなければ、100円ショップなどで乱暴に使ってもよいものを1本そろえておくのもよいです。
ギアボックス
次にタミヤのギアボックスを組み立てましょう。
こちらはちょっと時間がかかりますが、説明書のとおりに組み立てれば問題なく組み上がると思います。
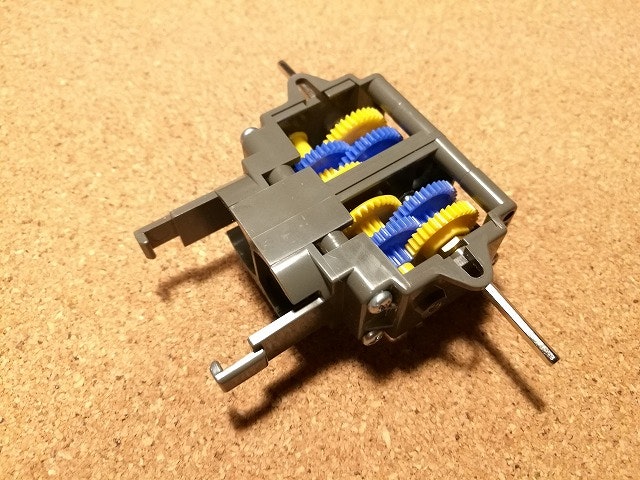
ギアの組み合わせによって速度を4段階の中から選べるのですが、最初な中間のどちらか(BかC)を選ぶとよいでしょう。速度とパワーはトレードオフなので、少し手間ですが一度完成させてから好みの速度に改めて調整するのがよいと思います。
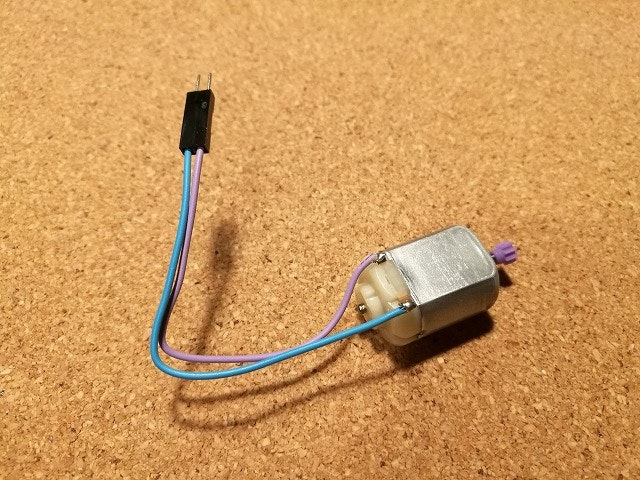
モーター
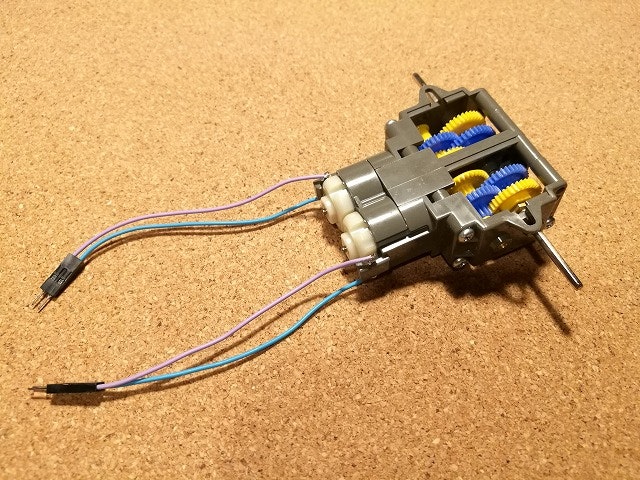
ギアボックスに同梱されているモーターに電線をつなぎます。
モーター側はできればはんだ付けし、伸びた先はQIコネクタをつけておくのがおすすめです。
※どうしても省略したい場合は、セロハンテープなどで強引に止めても一応動くとは思います。
耐熱ワイヤの長さは(写真だと短いですが)、車体の天井まで伸ばすので実際は 20cm くらいにしてください。
また、2本のつなぎ方で回転の方向が変わるので、それぞれ違う色のワイヤをつなげておくと、のちのちわかりやすいです。
QIコネクタの取り付け方はこちらの記事が詳しいです。(僕もこの記事を見ながら覚えました)
【Tips】電子工作でよく使う『QIコネクタ』の圧着方法
http://blog.digit-parts.com/archives/51796900.html
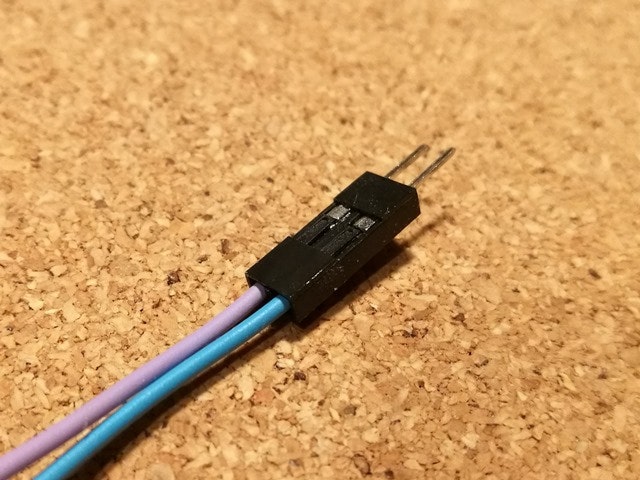
はんだ付け部分の拡大(ボケててごめんなさい)
QIコネクタの拡大(オスのピンを使ってください)
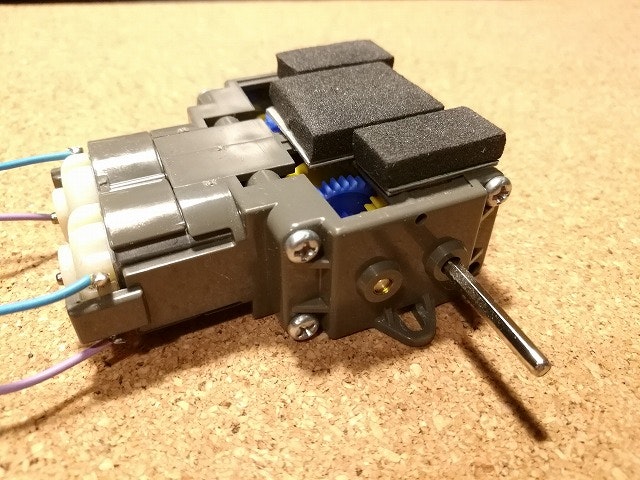
完成したギアボックス(写真の線は短いですが、前述のとおり20cmくらいあるのが正解です)
ギアボックスは上部の板と少し隙間が空くので、ここでスポンジ的なものを盛っておくと車体がより安定します。ただ、これは特に無くても走行に支障はないので、面倒な人はスキップしてもOKです。
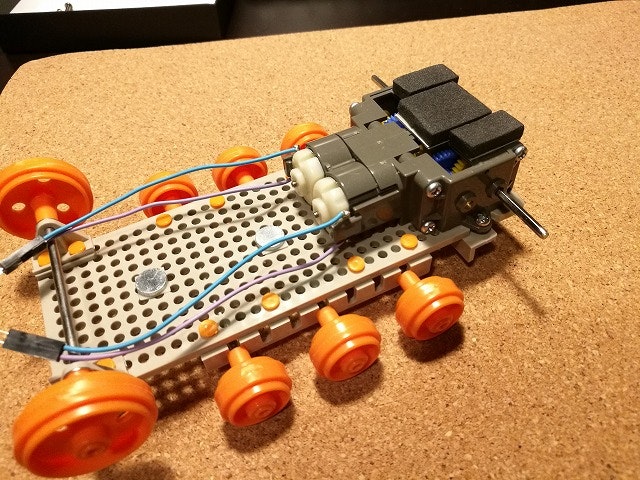
ギアボックスを車体に取り付ける
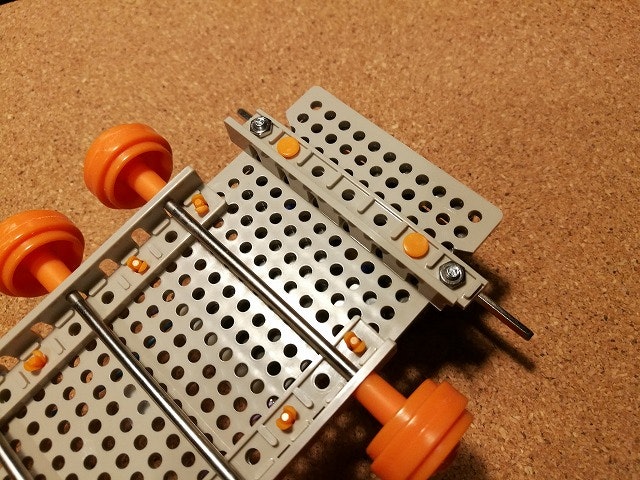
最初に組み立てた車体の、タイヤが空いていた方の端(切り込みを入れた方)にギアボックスを取り付けます。
ユニバーサルプレートに付いていた細長いパーツと、ギアボックスから出ているネジ穴を、ネジで挟み込むようにします。
ちょっとやりにくい作業ですが、下の写真のように左手の人差し指でナットを抑えながら、右手でネジを回すとやりやすいです。
また、ユニバーサルプレートはやわらかいので、きつく締めすぎないように注意してください。ギアボックスが動かなければOKです。

裏側から見たところ。ユニバーサルプレートについていたオレンジ色の留め具で2箇所留めておくとより安定します。
電池ボックス
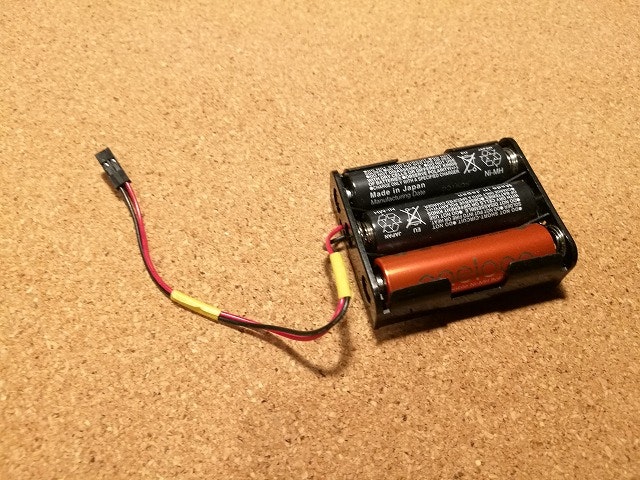
電池ボックスはQIコネクタをとりつけるだけです。うっかりショートさせないよう、電池は入れないで作業しましょう。
ボックスに付属の電線の長さに限りがあるので、ここでは一旦メスのQIコネクタをつけておき、そこから「ジャンパーワイヤー(オス×オス)」で天井まで配線することにします。
なお、電池ボックスにオスのQIコネクタをつけてしまうと、どこかの金属に触れたときにショートする可能性があるので、必ずメス側をつけるようにしてください。
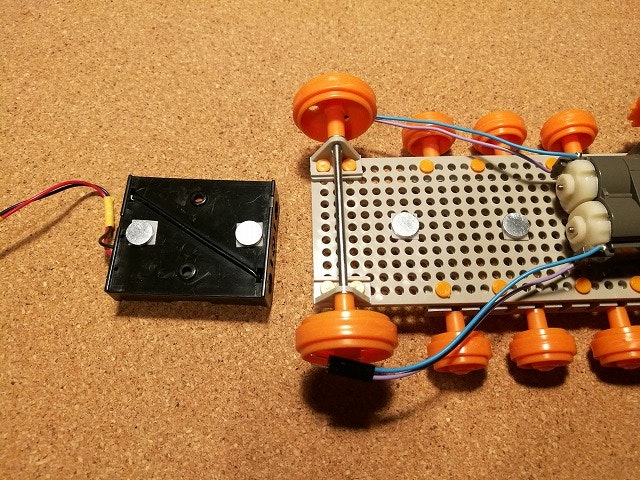
電池ボックスはこんな感じで車体に載せます。
このとき、強力磁石と強力両面テープがあれば、着脱式にしておくと電池交換がやりやすくなります。無ければ、マスキングテープなどで留めておきましょう。
2階部分
先に完成図をお見せすると、2階部分はこんな感じの仕上がりになります。
ギアボックス側の1階から2階への柱は、ギアボックスの横幅が一杯なので、少し内側に通すことになります。
写真では15mmと30mmのスペーサーを組み合わせていますが、15mmのものを組み合わせても同様のものは作れるでしょう。高さは、1階~2階が30mm(15mm×2本)、2~3階が45mm(15mm×3本)です。
上から眺めたところ。黒いシートが貼ってあるところは無視してください。銀色の磁石はのちほどRaspberry Piとモバイルバッテリーを載せるときにつけるので、今は貼らなくても大丈夫です。

少し下から眺めたところ。写真のようにこの2階のプレートではナットで留める(スペーサーはオス側)と、反対側がオスネジになり、ドライバーで留めやすくなります。
柱の位置は厳密に同じでなくても大丈夫です。それほど重いものを載せるわけではないので、空いているところならだいたい支えられると思います。
下図は底から見たところ。オスネジで4本のスペーサーを留めています。
いよいよRaspberry Piを載せます
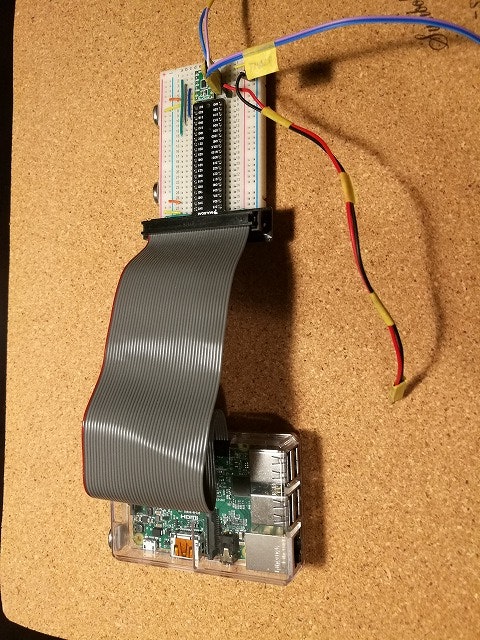
まずは、T字のブレクアウトボードに付属のケーブルを下図のようにRaspberry Piに接続します。
これがなくても直接GPIOピンをつなげばよいですが、位置を間違えないようRaspberry Piのピンマップをよく確認してください。

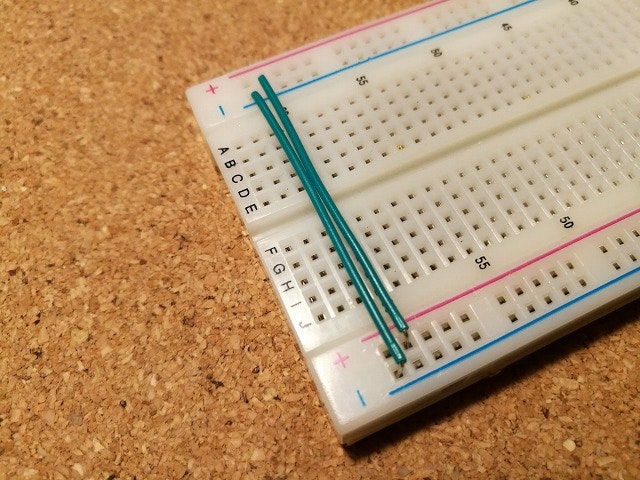
ブレッドボードの両端の+ーのラインを、このようにジャンパーワイヤでつないでおくと便利です。ぴったりの長さのジャンパーワイヤは無いと思うので、長めのものをニッパーで切って使います。
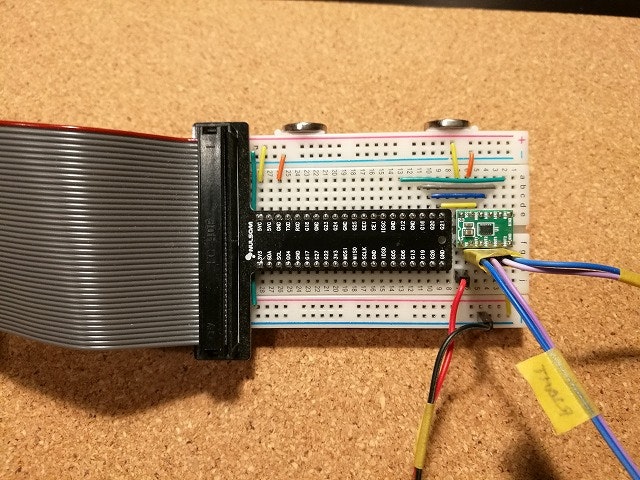
そして、そこに先程のケーブルの反対側を接続したT字ブレイクアウトボードを差し込みます。
隣に少しスペースができるので、そこにはモータードライバをはめます。
モータードライバははんだ付けがされていない状態で届くと思います。初めての方は大変だと思いますが、がんばってはんだ付けに挑戦してみてください。ブレッドボードに刺した状態ではんだ付けすると、やりやすいです。
はんだ付けはYoutubeで上手な人の動画を見てみるとコツがつかみやすいです。
配線については詳しくはモータードライバに付属の説明書を読んでください。
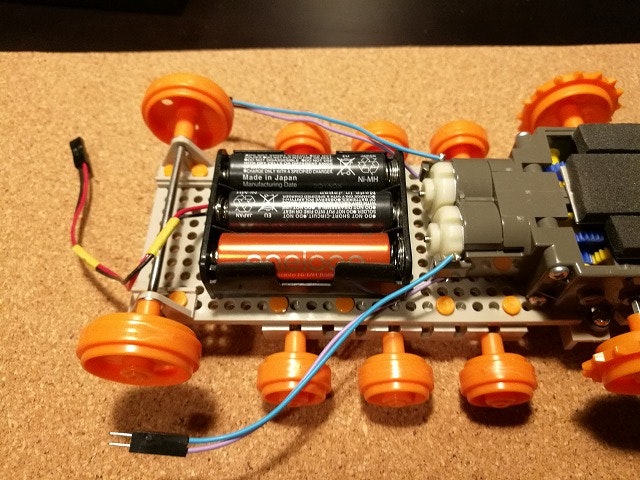
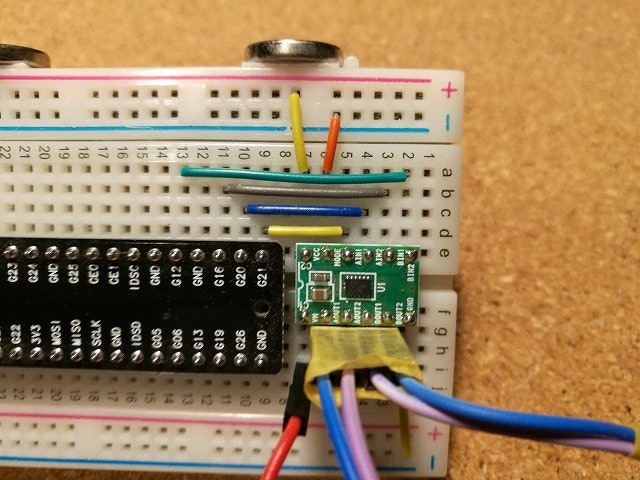
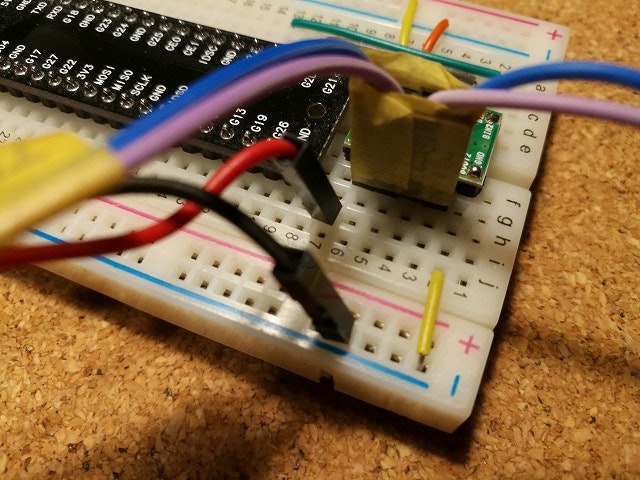
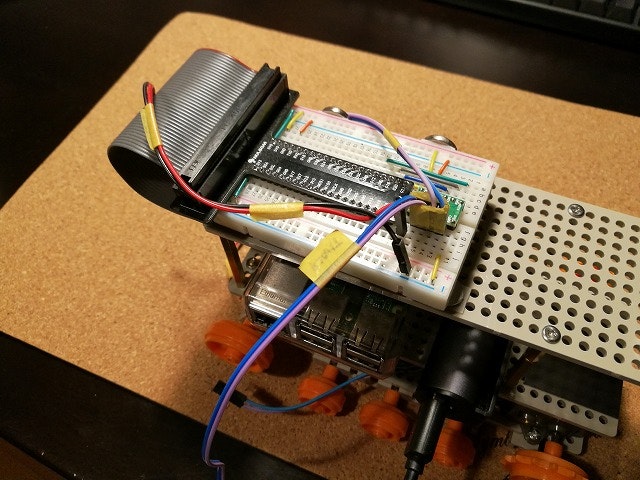
基本的には、モータードライバ自体を動かす5V, GNDをRaspberry Piからつなぎ、モータの電力源となる単3充電池からの電流を赤と黒の線で取り込み、青と薄紫の線でモーターへ送っています。モータードライバとT字ブレイクアウトボードをつなぐ逆三角形のようになっているワイヤ群は、モーターの回転方向を制御するもので、GPIOピンの12, 16, 20, 21を使用しています。
いくつか拡大写真を載せておきます。
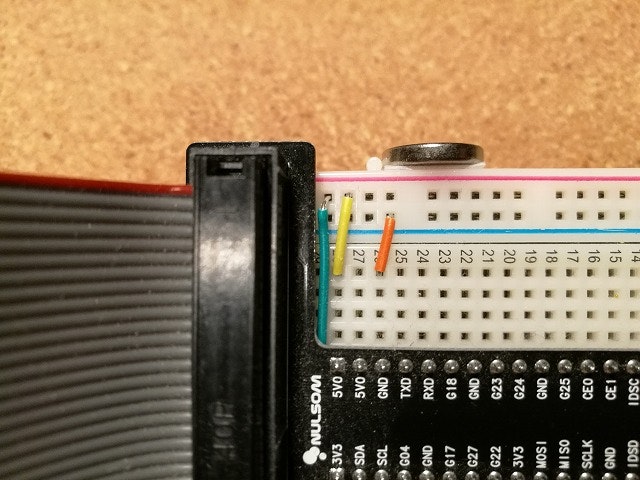
俯瞰するとこんな感じです。ブレッドボードやRaspberry Piの側面についている磁石は不要です。
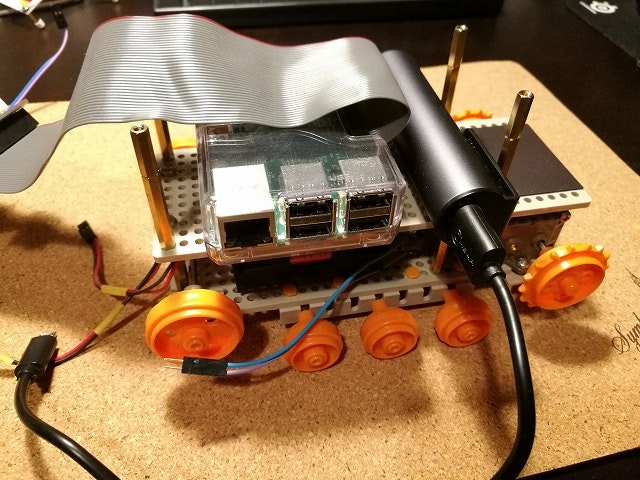
さて、配線が終わったら車体にマウントしましょう。
下の写真のように、横向きに配置します。隣にモバイルバッテリーも配置します。
充電池と同様に、磁石と両面テープの組み合わせで着脱式にできたらベターですが、無ければテープで留めても大丈夫です。
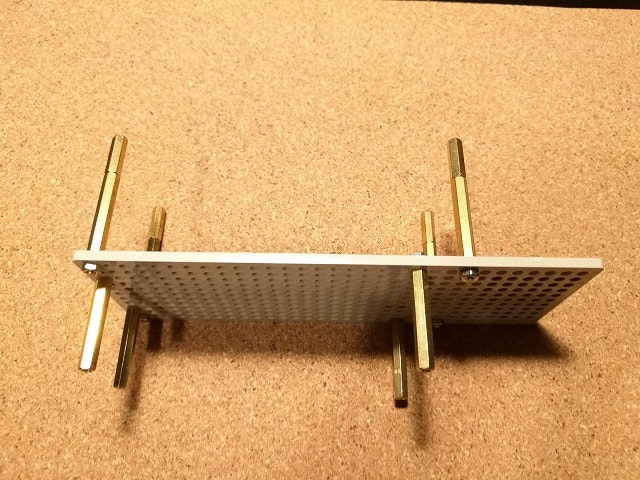
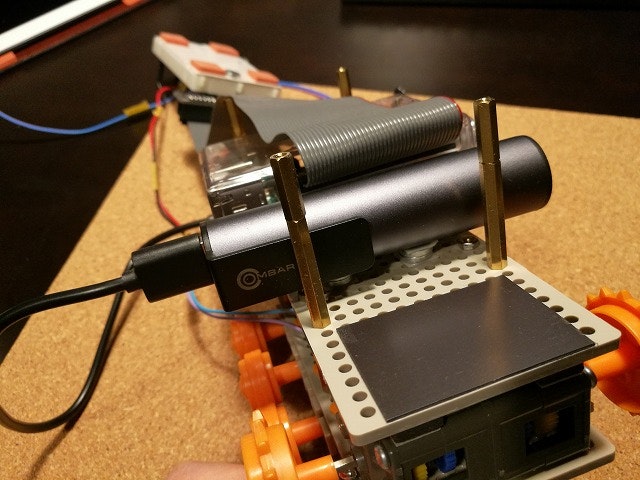
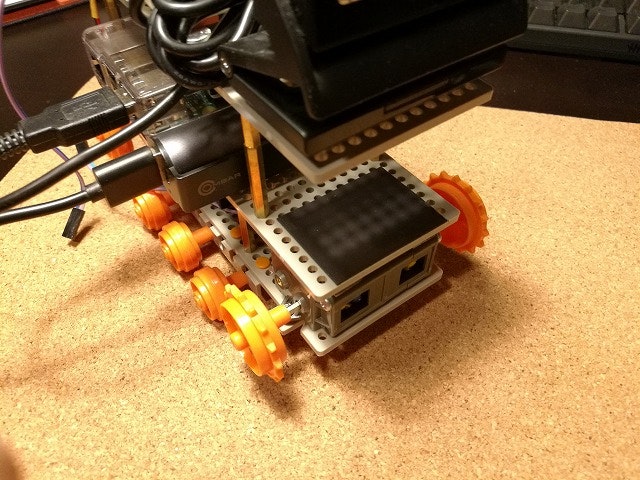
横から見たところ。

前から見たところ。
Webカメラとブレッドボード(3階部分)
ここまできたら、組み立てはあとひと息です。
3階部分を取り付けます。もうこの頃にはスペーサーのネジ止めにも慣れていることでしょう。
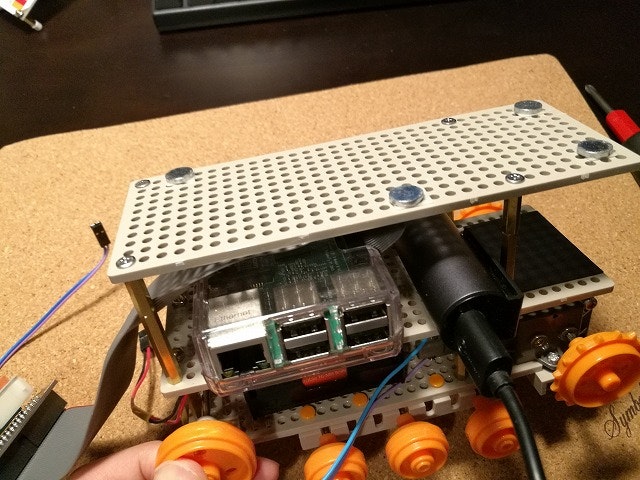
ブレッドボードはコードを折り返してこのあたりに配置します。裏側は磁石で着脱式にするか、あるいは単にテープで留めてもOKです。
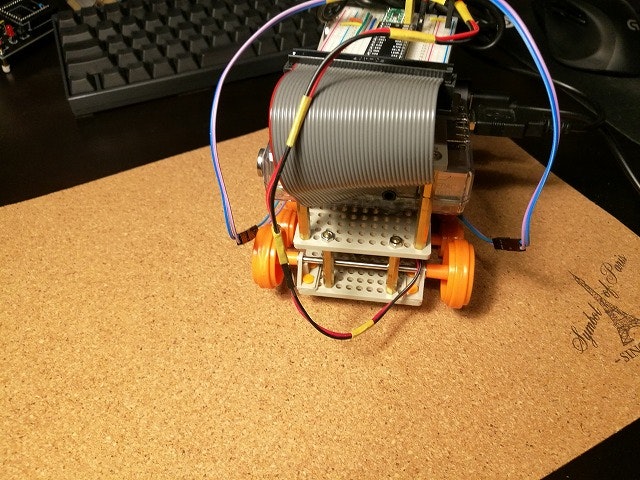
Webカメラを前方に取り付けます。同様に磁石かテープで留めてください。写真ではバッファローの広角モデルですが、それぞれ用意したWebカメラをつけてください。

おそらくWebカメラのUSBケーブルが余ると思うので、適当に束ねつつ、空いているスペースに収めてください。USB端子はRaspberry Piの空いているポートに指します。

先ほど出てきたこの黒い謎のスペースですが、ここは拡張用のスペースで今回は使いません。超音波距離センサーを設置して衝突回避を実装したり、LEDをつけて暗闇を照らすライトなど、いろいろなことができます。
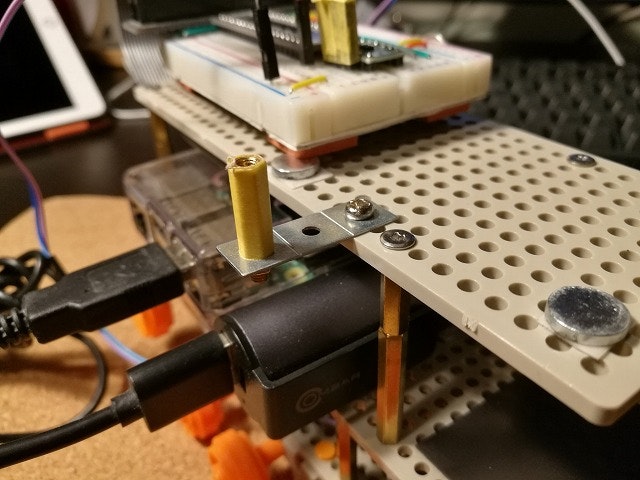
最後の配線
3階のブレッドボードと、1階の充電池、モーターを接続します。
モーターとブレッドボードの接続(水色・薄紫)は、写真だと一度QIコネクタを介していますが、本記事のとおり20cmで作っていれば、モーターから伸びた線を直接ブレッドボードに刺せると思います。
充電池の方は、電池ボックス付属の線につけたメスのQIコネクタに、購入したジャンパーワイヤー(オス×オス)をつなぐだけです。マスキングテープがあれば、軽く留めておくと衝撃で外れることがなくなるでしょう。
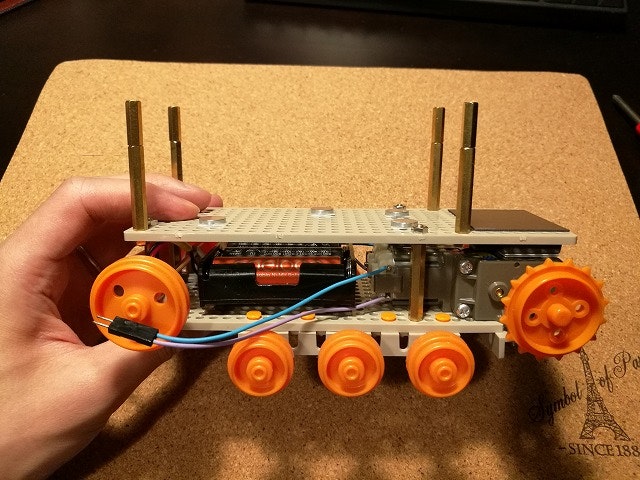
おまけ
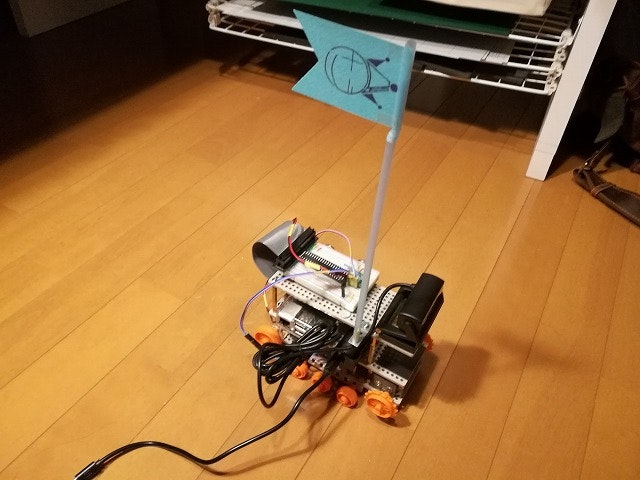
タミヤのユニバーサル金具の使用例ですが、こんな風に余ったスペーサーと組み合わせて、車体の外側にポールを立てます。ポールはマスキングテープを巻くなどして少し太くしておきます。
すると、そこにストローなどで作った旗を立てることができます!
まとめ
お疲れ様でした!
かなり細かい作業も多く、ここまで何時間もかかったかと思います。まだキャタピラが付いていませんが、付けない状態のほうがモーターの動作テストがしやすいので、このままにしておいてください。
キャタピラ以外の組み立ては一旦以上ですが、まだ残念ながら動きません。
次回は、肝心のRaspberry Pi側プログラムを作っていきましょう!