1.はじめに
近年、RISC-Vを採用したマイコンやSoC (System on Chip) が増えており、FPGA上でRISC-V SoCを構築する事例も増えている。
私自身、将来的にFPGA上やASICでRISC-VベースのSoC開発を行いたいと考えている。しかし、いきなりRTL (Register Transfer Lebel) 設計やSoC構築に取り組むのはハードルが高いため、まずは既存のRISC-Vチップを用いてセンサ制御を体験してみることにした。
今回は、RISC-Vコアを搭載した ESP32-C6 DevKit と、9軸IMUセンサである MPU9250 をI2C接続し、加速度データから姿勢角(Roll/Pitch)を取得してみる。
2.なぜESP32-C6なのか?
ESP32シリーズといえばWi-FiやBluetoothで有名ですが、ESP32-C6は従来のXtensaコアではなく、RISC-Vコアを採用しています。
今回の目的は単なるセンサ制御ではなく、
RISC-V ベースCPU
↓
I2C通信
↓
センサデータ取得
↓
角度計算
という組込みシステムの基本構造を体験することである。
3.使用機材
| 機材 | 用途 |
|---|---|
| XIAO ESP32-C6 | RISC-Vマイコン |
| MPU9250 | 9軸IMU |
| USB Type-Cケーブル | 書込み・給電 |
| ブレッドボード | 回路作成 |
| ジャンパワイヤ | 配線 |
4.開発環境
・Windows 11 Home, Version: 25H2
・Arduino IDE 2.3.9
上記からインストール可能

・ESP32 Board Package

Arduino IDE を開き
【Tools】 → 【Board】 → 【Boards Manager...】

BOARDS MANAGERでesp32を入力して
esp32 by Espressif System
を【INSTALL】してESP32を追加する。
※ESP32-C6(RISC-V)をArduino IDEで使おうとしたところ、ESP32ボードパッケージのインストールに失敗した。原因を調査した結果、楽天ポケットWiFi経由ではGitHub Releasesからのダウンロードが途中で切断され、スターバックスWiFiへ切り替えることで解消した。自分だけ??
設定するボードは
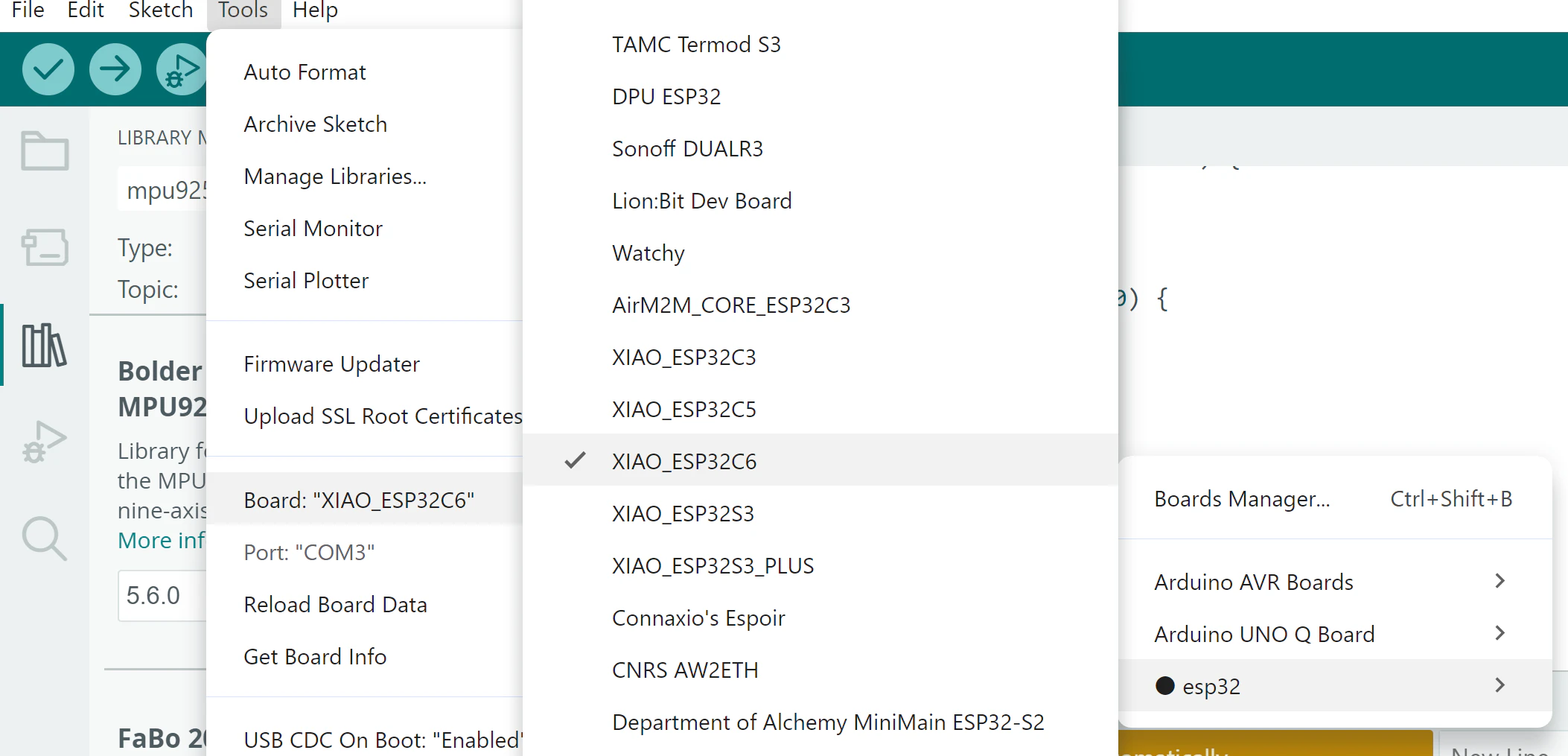
【Tools】 → 【Board】 → 【esp32】 → 【XIAO_ESP32C6】
である。
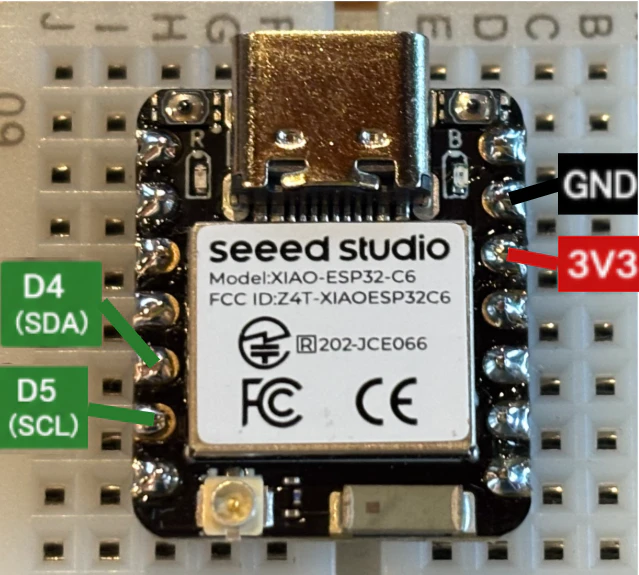
5.配線
今回はI2C通信を使用します。
| ESP32-C6 | MPU9250 |
|---|---|
| 3.3V → | VCC |
| GND → | GND |
| D4 → | SDA |
| D5 → | SCL |
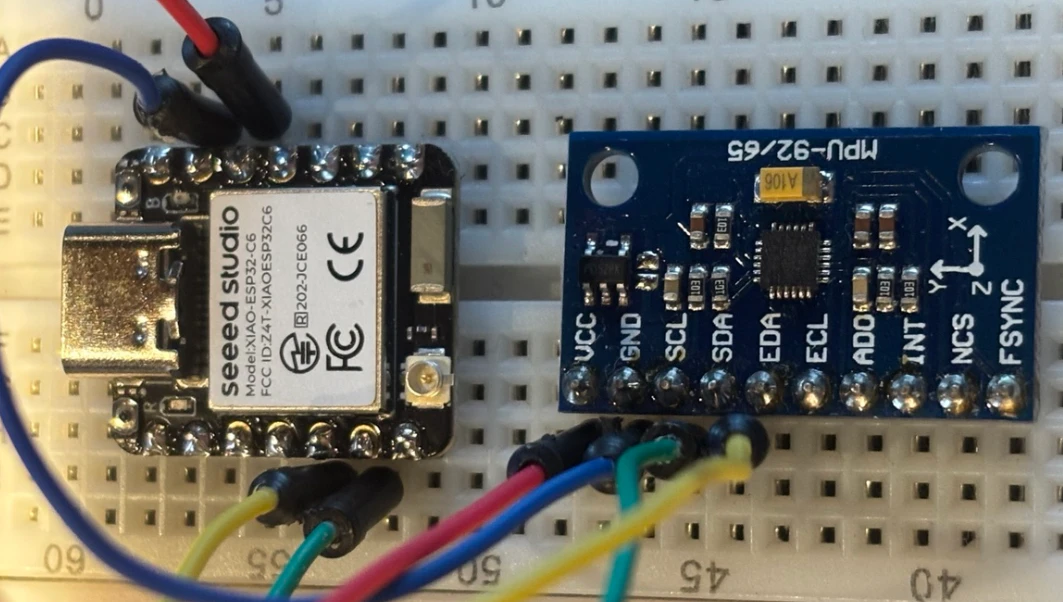
配線すると以下のようになる
6.I2Cデバイスを検出する
MPU9250が正しく接続されているか確認するためにI2Cスキャナを実行します。
#include <Wire.h>
void setup() {
Serial.begin(115200);
Wire.begin(D4, D5);
Serial.println("I2C Scan");
for (byte addr = 1; addr < 127; addr++) {
Wire.beginTransmission(addr);
if (Wire.endTransmission() == 0) {
Serial.print("Found: 0x");
Serial.println(addr, HEX);
}
}
}
void loop() {
}
シリアルモニタで確認すると、
Found: 0x68
と表示されていた。これでMPU9250が正しく認識されていることが分かる。
7.MPU9250から加速度を取得する
MPU9250の動作確認として、加速度センサの値を取得する。
MPU9250では加速度データがレジスタ 0x3B ~ 0x40 に格納されている。
| レジスタ | 内容 |
|---|---|
| 0x3B | ACCEL_XOUT_H |
| 0x3C | ACCEL_XOUT_L |
| 0x3D | ACCEL_YOUT_H |
| 0x3E | ACCEL_YOUT_L |
| 0x3F | ACCEL_ZOUT_H |
| 0x40 | ACCEL_ZOUT_L |
各軸は16bitの符号付き整数として格納されているため、上位バイト(H)と下位バイト(L)を結合して取得する。
加速度読み出し関数
まずは加速度レジスタから6バイトを読み出す関数を作成する。
#include <Wire.h>
int16_t read16()
{
int16_t high = Wire.read();
int16_t low = Wire.read();
return (high << 8) | low;
}
void readAccel(int16_t &ax,
int16_t &ay,
int16_t &az)
{
Wire.beginTransmission(MPU9250_ADDR);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU9250_ADDR, 6);
ax = read16();
ay = read16();
az = read16();
}
I2C通信の初期初期セットアップをする。
void setup()
{
Serial.begin(115200);
delay(1000);
Wire.begin(D4, D5);
Wire.setClock(100000);
Serial.println("MPU9250 Initialize");
// Sleep解除
writeReg(0x6B, 0x00);
// 加速度レンジ ±2g
writeReg(0x1C, 0x00);
Serial.println("Initialization Complete");
}
シリアルモニタへ出力
取得した加速度データをシリアルモニタへ表示する。
void loop()
{
int16_t ax_raw;
int16_t ay_raw;
int16_t az_raw;
readAccel(ax_raw,
ay_raw,
az_raw);
Serial.print("ax = ");
Serial.print(ax_raw);
Serial.print(", ay = ");
Serial.print(ay_raw);
Serial.print(", az = ");
Serial.println(az_raw);
delay(500);
}
G単位への変換
今回は加速度レンジを ±2g に設定している。
writeReg(0x1C, 0x00);
MPU9250のデータシートによると、±2g設定時の感度は16384 LSB/gである。
したがって加速度は次式で変換できる。
加速度[g] = 生データ / 16384
例えば、ax = 16384の場合は1.0 gを意味する。
コードでは以下のように変換する。
float ax = ax_raw / 16384.0;
float ay = ay_raw / 16384.0;
float az = az_raw / 16384.0;
8.加速度センサのみを利用して姿勢角を計算。
前章では、MPU9250から加速度 ax, ay, az を取得した。
ここでは、加速度センサの値だけを使って、基板の傾きであるRoll角 と Pitch角 を計算する。
Roll/Pitchの計算式
Roll角は、Y軸とZ軸の加速度から計算する。
Roll = atan2(ay, az)
Pitch角は、X軸、Y軸、Z軸の加速度から計算する。
Pitch = atan2(-ax, sqrt(ay * ay + az * az))
Arduinoでは atan2() の戻り値はラジアンなので、度数法に変換する。
float roll = atan2(ay, az) * 180.0 / PI;
float pitch = atan2(-ax, sqrt(ay * ay + az * az)) * 180.0 / PI;
プログラム
前章の加速度取得プログラムに、Roll/Pitchの計算を追加する。
#include <Wire.h>
#define MPU9250_ADDR 0x68
void writeReg(uint8_t reg, uint8_t data)
{
Wire.beginTransmission(MPU9250_ADDR);
Wire.write(reg);
Wire.write(data);
Wire.endTransmission();
}
int16_t read16()
{
int16_t high = Wire.read();
int16_t low = Wire.read();
return (high << 8) | low;
}
void readAccel(int16_t &ax, int16_t &ay, int16_t &az)
{
Wire.beginTransmission(MPU9250_ADDR);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU9250_ADDR, 6);
ax = read16();
ay = read16();
az = read16();
}
void setup()
{
Serial.begin(115200);
delay(1000);
Wire.begin(D4, D5);
Wire.setClock(100000);
Serial.println("MPU9250 Initialize");
// Sleep解除
writeReg(0x6B, 0x00);
// 加速度レンジ ±2g
writeReg(0x1C, 0x00);
Serial.println("Initialization Complete");
}
void loop()
{
int16_t ax_raw, ay_raw, az_raw;
readAccel(ax_raw, ay_raw, az_raw);
float ax = ax_raw / 16384.0;
float ay = ay_raw / 16384.0;
float az = az_raw / 16384.0;
float roll =
atan2(ay, az) * 180.0 / PI;
float pitch =
atan2(-ax, sqrt(ay * ay + az * az)) * 180.0 / PI;
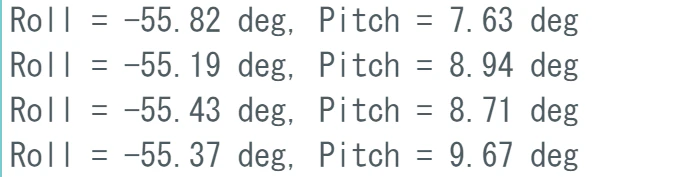
Serial.print("Roll = ");
Serial.print(roll, 2);
Serial.print(" deg, Pitch = ");
Serial.print(pitch, 2);
Serial.println(" deg");
delay(500);
}
実行結果の例
基板を水平に置いた場合は、おおよそ以下のようになる。
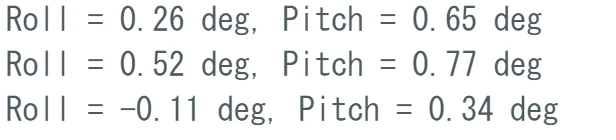
基板を傾けると、RollまたはPitchの値が変化する。
※注意点
この方法は加速度センサのみを使うため、静止状態の傾き推定には有効である。
一方で、基板を動かしたときには、重力加速度だけでなく運動による加速度も加わる。そのため、動作中の姿勢角は不安定になる。より安定した姿勢推定を行うには、次の段階でジャイロセンサを使い、相補フィルタやカルマンフィルタを導入する。
9.RISC-Vについて
Arduino IDEでもRISC-Vを使っている。Arduino IDEを使うと、RISC-Vを意識する機会はあまりない。
しかし実際には、
Arduinoコード
↓
ESP32 Arduino Core
↓
RISC-V GCC
↓
ESP32-C6
という流れでコンパイルされている。つまり今回の実験は、
RISC-V CPU
↓
I2Cコントローラ
↓
MPU9250
↓
角度演算
を実際に動かしていることになる。
10.おわりに
今回はESP32-C6とMPU9250を接続し、I2C通信による加速度取得と姿勢角計算を試してみた。FPGA上でRISC-V SoCを構築する等の応用に移る前に
RISC-Vとは何か
I2C通信とは何か
センサデータはどのように扱うのか
を実機で体験できる良い教材であった。
次回は、ESP32-C6で
ジャイロセンサの利用、相補フィルタ、倒立振子
などにも挑戦してみたいと思う。