はじめに
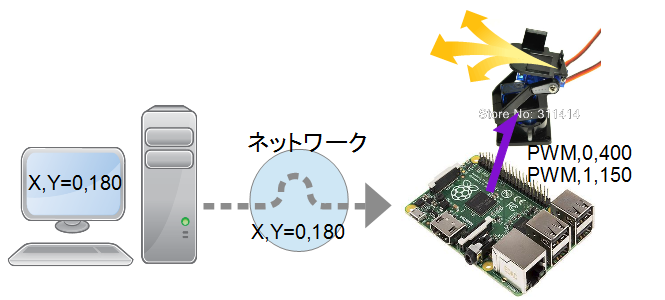
Raspberry Piに接続したサーボをリモート(クライアントサーバモデル)で制御するでは、ターミナルからRaspberry Piにテキストメッセージを送信して、サーボモータを制御しました。
このプロジェクトではVisual Studio 2017のMFCにて、Windowsのクライアントを作成します。
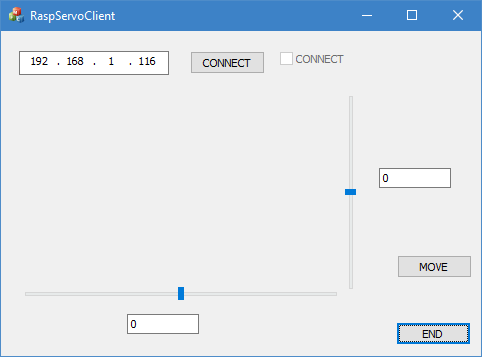
画面イメージ
IPを設定して、CONNECTで接続し、スライダバーで設定したい位置を設定し、MOVEを押すことでコマンドを送信します。
ソース
ソースはgithubにアップしています。
今後
これをクライアントのサンプルとして、今後はOpenCVとの連携を狙っていく予定です。OpenCVはVisualStudio+MFCでの運用を想定しています。
2018/02/04 Ikeda