※ネタ注意
お子さんの夏休みの宿題がてら、かつPythonとAnsibleモジュールのお勉強も兼ねて
Ansibleで扇風機を操作してみましょう。
必要なもの
・ラズパイ
http://akizukidenshi.com/catalog/g/gM-10414/
・赤外線LED
http://akizukidenshi.com/catalog/g/gI-11845/
・赤外線受光モジュール
http://akizukidenshi.com/catalog/g/gI-04659/
・ジャンパ線、抵抗
・ブレッドボード接続キット(あると回路組みやすい)
http://akizukidenshi.com/catalog/g/gK-08892/
これらを用意します。
現在、秋月電子はお盆休みですのでご注意ください。
Ansibleインストール
SDカードにraspibianを焼いて起動させます。
固定IPを設定したら、以下のPlaybookでラズパイにAnsibleをインストールします。
---
- hosts: raspi
connection: ssh
become: true
gather_facts: False
tasks:
- name: replace repo
replace:
path: /etc/apt/sources.list
regexp: 'http://raspbian.raspberrypi.org/raspbian/'
replace: 'http://ftp.jaist.ac.jp/raspbian/'
- name: install need pack
apt:
name: "{{ packages }}"
state: present
update_cache: yes
vars:
packages:
- python3-dev
- python3-crypto
- libffi-dev
- libssl-dev
- name: get-pip.py
command: wget https://bootstrap.pypa.io/get-pip.py
- name: pip install
command: python3 get-pip.py
- name: pip install ansible
command: python3 -m pip install ansible
Ansibleを入れるとこでちょっと時間がかかりましたが入りました。
root:~/ans # ansible-playbook -i hosts install_ansible_raspi.yml
PLAY [raspi] ***************************************************************************
TASK [replace repo] ********************************************************************
changed: [192.168.0.21]
TASK [install need pack] ***************************************************************
changed: [192.168.0.21]
TASK [get-pip.py] **********************************************************************
[WARNING]: Consider using the get_url or uri module rather than running wget. If you
need to use command because get_url or uri is insufficient you can add warn=False to
this command task or set command_warnings=False in ansible.cfg to get rid of this
message.
changed: [192.168.0.21]
TASK [pip install] *********************************************************************
changed: [192.168.0.21]
TASK [pip install ansible] *************************************************************
changed: [192.168.0.21]
PLAY RECAP *****************************************************************************
192.168.0.21 : ok=5 changed=5 unreachable=0 failed=0
root:~/ans #
2.6.2 が入りました。
pi@raspberrypi:~ $ ansible --version
ansible 2.6.2
config file = None
configured module search path = ['/home/pi/.ansible/plugins/modules', '/usr/share/ansible/plugins/modules']
ansible python module location = /usr/local/lib/python3.5/dist-packages/ansible
executable location = /usr/local/bin/ansible
python version = 3.5.3 (default, Jan 19 2017, 14:11:04) [GCC 6.3.0 20170124]
pi@raspberrypi:~ $
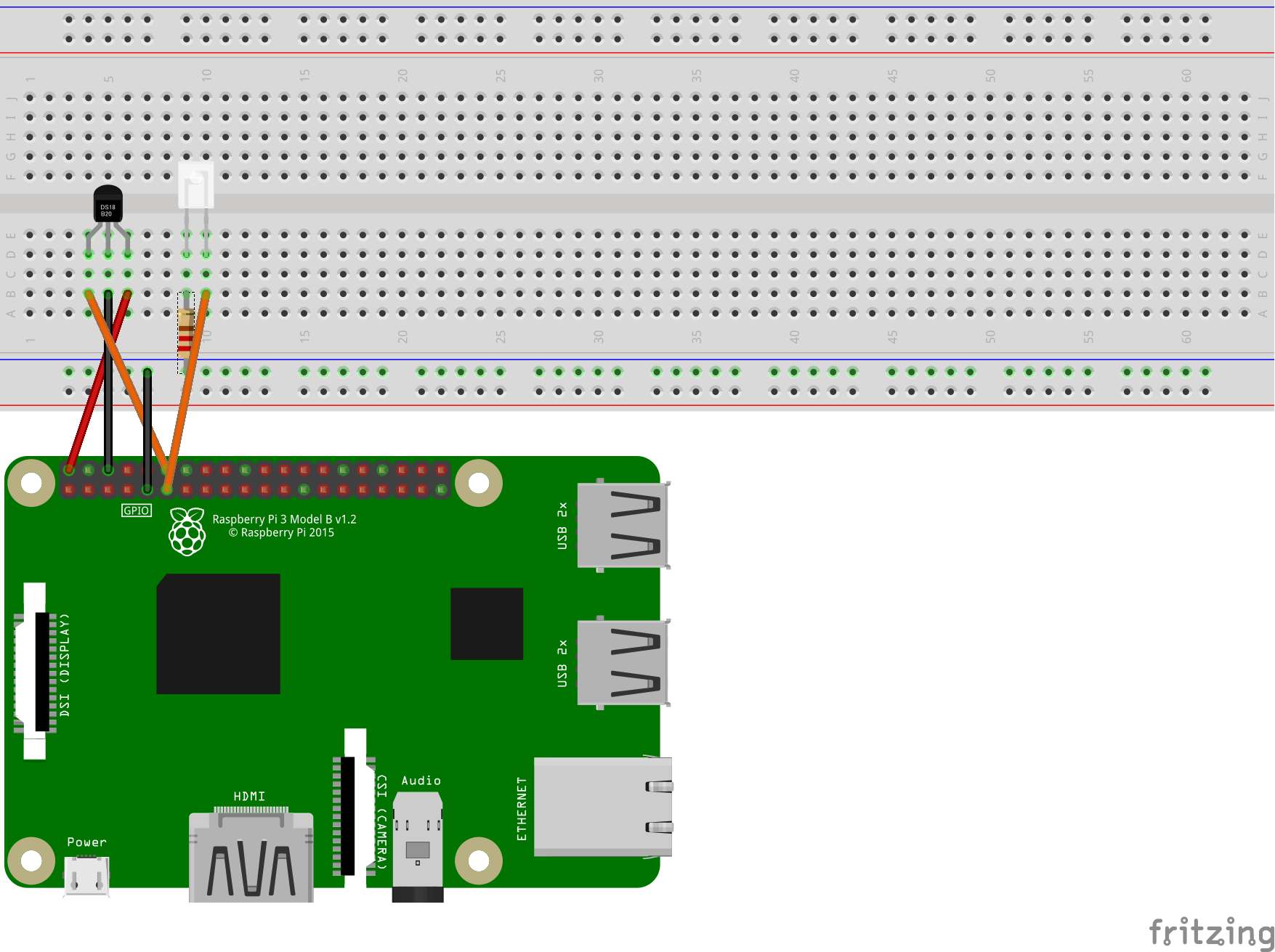
回路
受光モジュールと赤外線LEDをこんな感じで配線します。
赤外線リモコンの設定
こちらのページを参考に扇風機のリモコンの信号を受光器で読み取って、コマンドの設定をします。
以下のPlaybookでlircのインストールと/boot/config.txtを設定します。
---
- hosts: raspi
connection: ssh
become: true
gather_facts: False
tasks:
- name: install lirc
apt:
name: lirc
state: present
update_cache: yes
- name: add line config.txt
lineinfile:
path: /boot/config.txt
line: "dtoverlay=lirc-rpi:gpio_out_pin=17,gpio_in_pin=18,gpio_in_pull=up"
設定できました。
root:~/ans # ansible-playbook -i hosts install_lirc.yml
PLAY [raspi] ***************************************************************************
TASK [install lirc] ********************************************************************
changed: [192.168.0.21]
TASK [add line config.txt] *************************************************************
changed: [192.168.0.21]
PLAY RECAP *****************************************************************************
192.168.0.21 : ok=2 changed=2 unreachable=0 failed=0
root:~/ans #
いったん再起動します。
pi@raspberrypi:~ $ sudo reboot
再起動後、/dev/lirc0の存在とlsmodでlircがロードされてることを確認します。
pi@raspberrypi:~ $ ls -l /dev/lirc*
crw-rw---- 1 root video 243, 0 Aug 12 14:45 /dev/lirc0
pi@raspberrypi:~ $ lsmod | grep lirc
lirc_rpi 16384 0
lirc_dev 16384 1 lirc_rpi
pi@raspberrypi:~ $
受光モジュールに向けてリモコンを押して読み取らせます。
pi@raspberrypi:~ $ irrecord -n -d /dev/lirc0 rimokon.conf
作成したファイルをフォルダにコピーします。
pi@raspberrypi:~ $ sudo cp senpuuki.lircd.conf /etc/lirc/lircd.conf.d/
設定ファイルを編集します。
pi@raspberrypi:~ $ sudo vi /etc/lirc/lirc_options.conf
11 driver = default
12 device = /dev/lirc0
サービスを起動して確認します。
pi@raspberrypi:~ $ sudo systemctl restart lircd
pi@raspberrypi:~ $ irsend LIST "" ""
devinput
devinput
senpuuki
pi@raspberrypi:~ $ irsend LIST "senpuuki" ""
0000000000000001 off
0000000000000002 on
0000000000000003 up
pi@raspberrypi:~ $
コマンドで動くか確認します。
pi@raspberrypi:~ $ irsend SEND_ONCE senpuuki on
pi@raspberrypi:~ $ irsend SEND_ONCE senpuuki up
pi@raspberrypi:~ $ irsend SEND_ONCE senpuuki off
senpuukiモジュールの作成
コマンドで動くことを確認したらモジュールにしてみます。
各モジュールのソースを見る限り、以下のお作法が守れてればよさげな気がします。
・最初にfutureを呼ぶ
・何かわからんがANSIBLE_METADATAっていうのを書いておく
・Playbookからパラメータを受け取る
・成功したらexit_json、失敗したらfail_jsonを呼ぶ
※公式doc読んでません...さーせんww
でこんな感じになりました。
#!/usr/bin/python3
# -*- coding: utf-8 -*-
from __future__ import absolute_import, division, print_function
__metaclass__ = type
from ansible.module_utils.basic import AnsibleModule
ANSIBLE_METADATA = {'metadata_version': '1.1',
'status': ['stableinterface'],
'supported_by': 'community'}
def main():
module = AnsibleModule(
argument_spec=dict(
power_state=dict(type='str', required=True)
)
)
power = module.params['power_state']
if power == "on":
cmd = "irsend SEND_ONCE senpuuki on"
elif power == "up":
cmd = "irsend SEND_ONCE senpuuki up"
elif power == "on-up":
cmd = "irsend SEND_ONCE senpuuki on && irsend SEND_ONCE senpuuki up"
else:
cmd = "irsend SEND_ONCE senpuuki off"
(rc, out, err) = module.run_command(cmd)
if rc == 0:
module.exit_json(msg="OK", changed=True)
if __name__ == '__main__':
main()
run_commandでコマンドを実行するだけです。
Oh...ってエラー処理してないですね...31日までに書いておきます。
扇風機の状態を変えるので、changed=Trueを返しています。
作ったファイルは/usr/local/lib/python3.5/dist-packages/ansible/modulesに配置します。
Playbookはこんな感じで
---
- hosts: localhost
connection: local
gather_facts: False
tasks:
- name: 扇風機つけるお
raspberrypi_senpuuki:
power_state: on
register: result
- debug:
var: result
実行してみます。
pi@raspberrypi:~/an $ ansible-playbook -i hosts senpuuki.yml
PLAY [localhost] ***********************************************************************
TASK [扇風機つけるお] *************************************************************************
changed: [localhost]
TASK [debug] ***************************************************************************
ok: [localhost] => {
"result": {
"changed": true,
"failed": false,
"msg": "OK"
}
}
PLAY RECAP *****************************************************************************
localhost : ok=2 changed=1 unreachable=0 failed=0
pi@raspberrypi:~/an $
僕の部屋の扇風機がONしました。(伝わらないけど伝われ)
ラズパイでAnsibleを動かすのは、まぁ本来の用途ではないのは十分承知しておりますが、
電子工作、Python、Ansibleもろもろで遊べるんで大人の自由研究として遊んでみます。
おわり。