概要
arduino unoでフィードバック制御をやってみた。
写真
動画
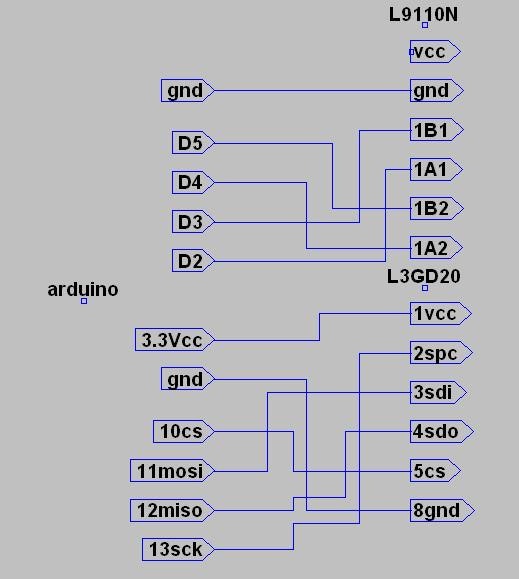
回路図
サンプルコード
#include <SPI.h>
#include <L3GD20.h>
#include <PID_v1.h>
unsigned long time;
L3GD20 gyro(10);
float dc_offsetY = 0;
float rateY;
float prev_rateY = 0;
float angleY = 0;
int sampleTime = 10;
double Setpoint = 0;
double Input = 0;
double Output = 0;
int rec[10];
PID robo(&Input, &Output, &Setpoint, 200.0, 50.0, 30.0, REVERSE);
void setup()
{
int sampleNum = 1024;
int X, Y, Z;
float x, y, z;
Serial.begin(115200);
pinMode(4, OUTPUT);
pinMode(7, OUTPUT);
Setpoint = 250.0;
robo.SetOutputLimits(-255.0, 255.0);
robo.SetSampleTime(sampleTime);
robo.SetMode(AUTOMATIC);
Serial.print(" start\t");
gyro.begin();
Serial.println(" ok!");
for (int n = 0; n < sampleNum; n++)
{
Y = gyro.read(L3GD20_Y_H);
y = (Y << 8) | gyro.read(L3GD20_Y_L);
dc_offsetY += y;
}
dc_offsetY = dc_offsetY / sampleNum;
Serial.print(" Y: ");
Serial.print(dc_offsetY);
for (int i = 0 ; i < 10 ; i++)
{
rec[i] = 0;
}
}
void loop()
{
int X, Y, Z;
float x, y, z;
int count;
int i;
if (millis() - time >= sampleTime)
{
time = millis();
Y = gyro.read(L3GD20_Y_H);
y = (Y << 8) | gyro.read(L3GD20_Y_L);
rateY = (y - dc_offsetY) / 100;
angleY += ((float) (prev_rateY + rateY) * sampleTime) / 2000;
rec[0] = rateY - prev_rateY;
prev_rateY = rateY;
if (angleY < 0)
{
angleY += 360;
}
else if (angleY >= 360)
{
angleY -= 360;
}
count = 0;
for (i = 0; i < 10; i++)
{
if (abs(rec[i]) < 1)
{
count++;
}
}
if (count > 9)
{
Setpoint = angleY;
Serial.print(Setpoint);
Serial.println(" setpoint");
}
for (i = 9; i > 0; i--)
{
rec[i] = rec[i - 1];
}
Input = angleY;
if (robo.Compute())
{
}
else
{
Serial.print(" ng ");
}
int speed = Output;
if (speed > 0)
{
digitalWrite(4, HIGH);
analogWrite(5, 256 - speed);
analogWrite(6, 256 - speed);
digitalWrite(7, HIGH);
}
else
{
digitalWrite(4, LOW);
analogWrite(5, -speed);
analogWrite(6, -speed);
digitalWrite(7, LOW);
}
}
}