概要
久しぶりのM5Stackネタ。Seeed Studio で 24GHz-mmWave-Radar-Sensor-Sleep-Breathing-Monitoring-Module というのを見つけたので試してみた。
ドップラーレーダーで体の動きを拾うというもの。
仕組みはこちらなどで、
- https://www.kll.keio.ac.jp/ktm2015/pdf/01_ohtsukilab.pdf
- https://eetimes.itmedia.co.jp/ee/articles/1506/25/news099.html
試行
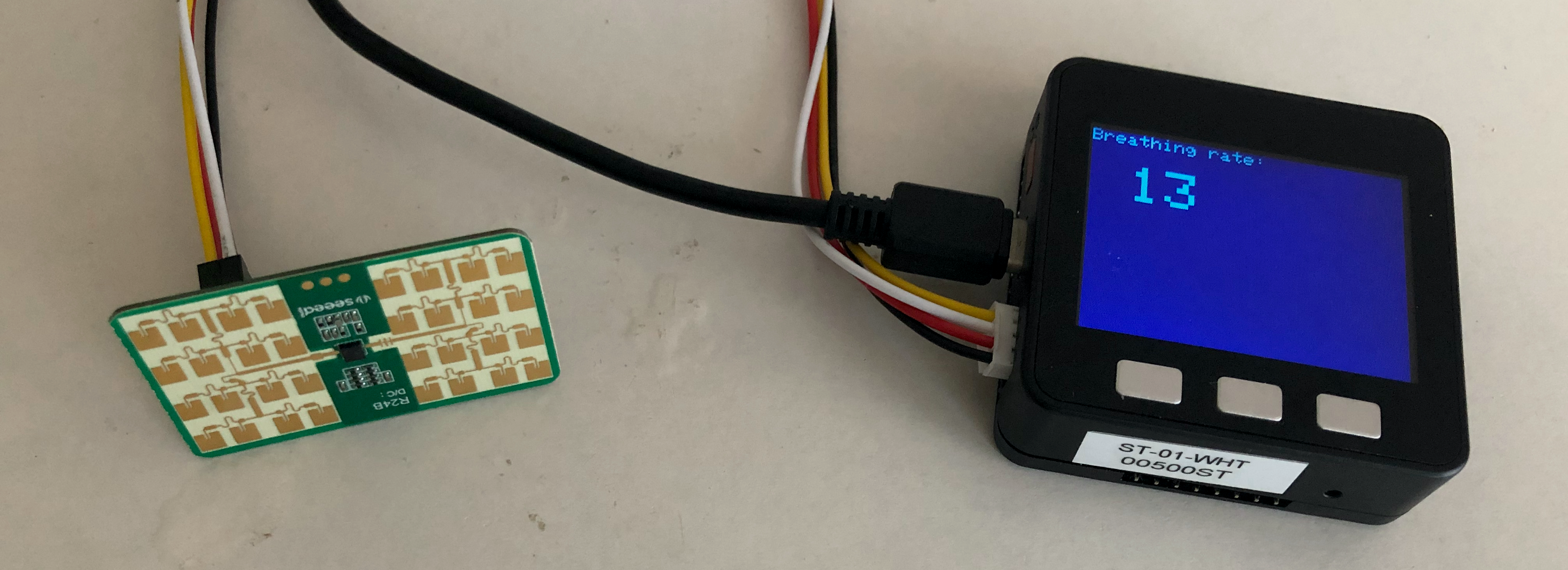
このボードは分析結果の数値をシリアルで渡してくれるので、M5Stackと GROVE - 4ピン-ジャンパメスケーブル で繋いで読み取る。
Groveの21ピンをrx、22ピンをtxに割り当て、それぞれボードのtx、rxに接続する。
main.cpp
#include <M5Stack.h>
HardwareSerial serial_ext(2);
#define MESSAGE_HEAD 0x55
int data[20] = {0};
int i, j = 0;
int Msg;
typedef union {
unsigned char Byte[4];
float Float;
} Float_Byte;
float bodysign(int ad1, int ad2, int ad3, int ad4) {
Float_Byte fb;
fb.Byte[0] = ad1;
fb.Byte[1] = ad2;
fb.Byte[2] = ad3;
fb.Byte[3] = ad4;
return fb.Float;
}
void setup() {
M5.begin();
M5.Lcd.fillScreen(TFT_NAVY);
M5.Lcd.setTextColor(TFT_CYAN);
M5.Lcd.setTextSize(2);
M5.Lcd.drawString("Breathing rate:", 0, 0);
serial_ext.begin(9600, SERIAL_8N1, 21, 22);
Serial.print("Ready.");
}
void loop() {
if (serial_ext.available() > 0) {
Msg = serial_ext.read();
if (Msg == MESSAGE_HEAD) {
if (data[3] == 0x00) {
//
} else if (data[3] == 0x05 && data[4] == 0x01 && data[5] == 0x01) {
M5.Lcd.fillRect(40, 40, 100, 100, TFT_NAVY);
M5.Lcd.setCursor(40, 40);
M5.Lcd.setTextSize(6);
M5.Lcd.printf("%d", data[6]);
Serial.printf("Breathing rate: %d\n", data[6]);
} else if (data[3] == 0x05 && data[4] == 0x06 && data[5] == 0x01) {
Serial.printf("Heart rate: %d\n", data[6]);
} else if (data[3] == 0x05 && data[4] == 0x01 && data[5] == 0x04) {
if (data[6] == 0x00) {
Serial.printf("Breathing: Normal.\n");
} else if (data[6] == 0x01) {
Serial.printf("Breathing: Holding-abnormality.\n");
} else if (data[6] == 0x02) {
Serial.printf("Breathing: No.\n");
} else if (data[6] == 0x04) {
Serial.printf("Breathing: Movement-abnormalities.\n");
} else if (data[6] == 0x05) {
Serial.printf("Breathing: Shortness abnormal.\n");
}
} else if (data[3] == 0x04 && data[4] == 0x03 && data[5] == 0x05) {
if (data[6] == 0x00) {
Serial.printf("Environment: Unoccupied.\n");
} else if (data[7] == 0x00) {
Serial.printf("Environment: Stationary.\n");
} else {
Serial.printf("Environment: Moving.\n");
}
} else if (data[3] == 0x04 && data[4] == 0x03 && data[5] == 0x06) {
Serial.printf("Motor sign: %f\n", bodysign(data[6], data[7], data[8], data[9]));
} else if (data[3] == 0x04 && data[4] == 0x03 && data[5] == 0x07) {
if (data[8] == 0x01) {
Serial.printf("Approaching: None.\n");
} else if (data[8] == 0x02) {
Serial.printf("Approaching: Approach.\n");
} else {
Serial.printf("Approaching: For Away.\n");
}
} else if (data[3] == 0x04 && data[4] == 0x05 && data[5] == 0x01) {
if (data[6] == 0x00) {
Serial.printf("Heartbeat Pack: Unoccupied.\n");
} else if (data[7] == 0x00) {
Serial.printf("Heartbeat Pack: Stationary.\n");
} else {
Serial.printf("Heartbeat Pack: Moving.\n");
}
} else {
for (j = 0; j < 20; j++) {
Serial.printf("%02x ", data[j]);
}
Serial.println("");
}
i = 0;
data[i] = Msg;
i++;
} else {
data[i] = Msg;
if (i < 19) i++;
}
} else {
delay(25);
}
}
めでたし。
課題
受信はできたものの、ボードに対してコマンド送信がまだうまくいかない。