x 超超重要 なぜか秋月STM32G031J6M6がうり切れていた。注意!!(2022/8/27現在)
x SWDをいじるので上級者向け
x なぜか3秒ルールが適用できず1回書き込むとシリアル書き込みしか受け付けない
x 過去ログを見よ!!
x OBでGPIOとブートのレガシーピンが有効がわかる人よう
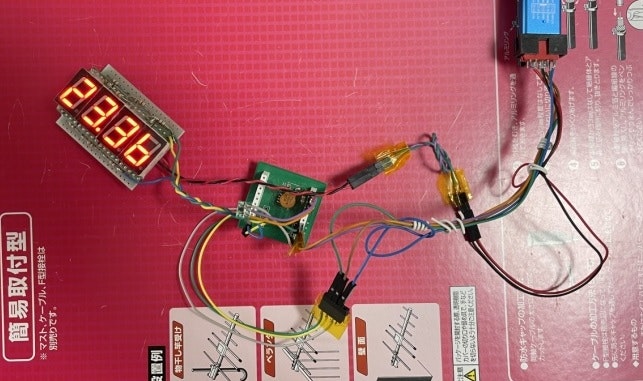
目的
SPIのテスト
//SPI_7SEG_S-8120C_float_031_1
#include "mbed.h"
//******* ****** ***** *****
// * * * *
// * * ***** * ***
// * **** * * *
// * * * * *
// * ***** ***** *****
//アナログ入力の設定
//AnalogIn adc_vbat(D0); //PB_7 ADC1/11
AnalogIn adc_vbat(PB_7); //PB_7 ADC1/11
SPI spi( PB_5 , PB_4 , PA_1); // mosi, miso, sclk //031
DigitalOut en( PA_13 ); //031
char seg[32] = {
0x00 , //0 @ -> ' '
0x77 , //1 A o
0x7c , //2 B combined use "6"
0x39 , //3 C
0x5e , //4 D
0x79 , //5 E o
0x71 , //6 F
0x3d , //7 G
0x76 , //8 H o
0x06 , //9 I combined use "1"
0x1e , //10 J
0x75 , //11 K
0x38 , //12 L o
0x15 , //13 M
0x37 , //14 N o
0x3f , //15 O o combined use "0"
0x73 , //16 P
0x67 , //17 Q combined use "9"
0x50 , //18 R
0x6d , //19 S combined use "5"
0x78 , //20 T
0x3e , //21 U
0x1c , //22 V
0x2a , //23 W o
0x64 , //24 X
0x6e , //25 Y
0x5b , //26 Z combined use "2"
0x4f , //27 [ --> "3"
0x66 , //28 \ --> "4"
0x27 , //29 ] --> "7"
0x7f , //26 ^ --> "8"
0x08 //31 _
};
char nn[]= {'O','I','Z','[','\\','S','B', ']','^','Q'};
int comma1=0; // コンマ(小数点)の有効フラグ 1で有効 0無効
SPI *_spi1;
DigitalOut *_en1;
//7segの一文字出力 nana_seg
int ns_putc(char ch) {
if(ch == ' ') {
ch = '@';
} else if(ch == '.') {
return(0);
} else if (ch >= '0' && ch <= '9' ) {
ch = nn[ch-'0'];
}
if( comma1 != 0 ) { comma1 = (0x80); }
_spi1->write(seg[ch-64] | comma1 );*_en1=1;*_en1=0;
comma1 = 0;
//戻り値
return(0);
}//ns_putc
//文字列の表示 nana_seg
int ns_printf(char *str1) {
//文字の中身がゼロか
while(*str1){
//コンマの処理
comma1=0;
if( (*(str1+1) ) == '.' ) { comma1=1; }
//一文字出力
ns_putc(*str1 ++);
} //while
//戻り値
return(0);
}//ns_printf
//メイン関数
int main()
{
// not delete 3s wait
wait_us(1000*1000); //1秒待つ
wait_us(1000*1000); //1秒待つ
wait_us(1000*1000); //1秒待つ
SPI spi( PB_5 , PB_4 , PA_1); // mosi, miso, sclk //031
DigitalOut en( PA_13 ); //031
_spi1 = &spi;
_en1 = &en;
spi.format(8,0);
spi.frequency(1000000);
en=0;
char data_read[256]; //バッファー
//無限ループ
while(1) {
//センサーのADC値を電圧に変換
float v = adc_vbat.read() * 3300;
//センサーの電圧を温度に変換
// v = -8.2 * t + 1705 => t = (v - 1705.0) / -8.2;
float t = (v - 1705.0) / -8.2;
//整数と小数に分離
int t_i = (int)t;
int t_s = (int)(t*100);
t_s = t_s - (t_i * 100);
//数値の表示
sprintf( data_read, "%2d.%02d", t_i, t_s);
ns_printf(data_read);
//1秒待つ
wait_us(1000*1000);
} //while
} //main