RTAB-Map
RTAB-Map(Real-Time Appearance-Based Mapping)は、RGB-Dカメラを用いたSLAM(自己位置推定と地図生成を同時に行う技術)である。
特徴
- bag-of-words approachによる閉ループ検出とグラフ最適化
- SURFやSIFT特徴量を用いる
- Kinect、Xtion、ステレオカメラなどでも動作する
ソースコード
ここからソースコードをダウンロードしてRTABMap.exeがあるので実行。ROSでも動くらしい。
動作環境
- Windows8.1(RAM 8GB, 2 cores @ 2.1GHz)
- Kinect v1 (XBOX360)
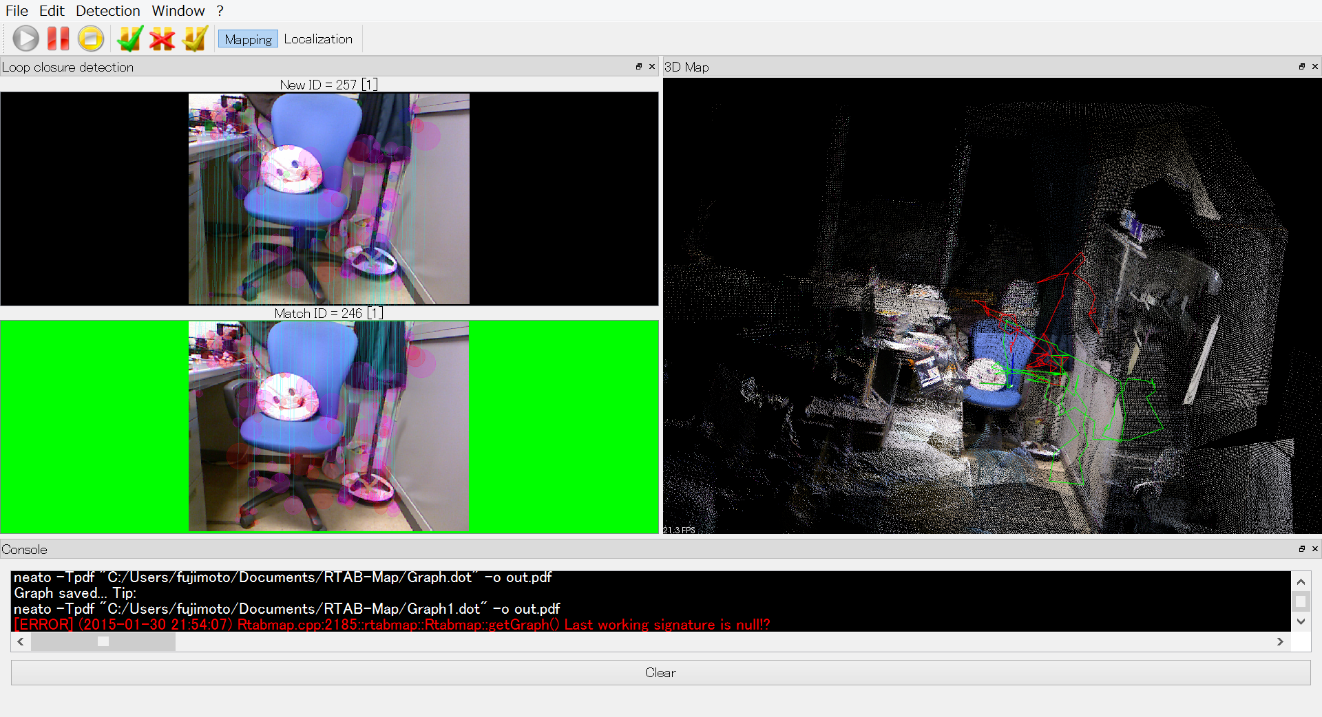
実行結果
3次元再構築したマップはcloud.plyファイルで保存できるので、MeshLab等で開いてみる。
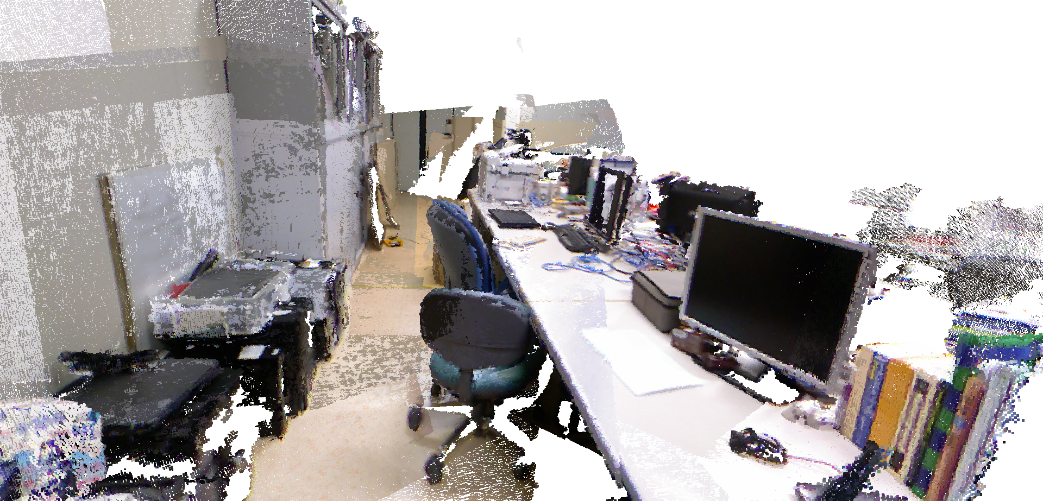

Kinectのケーブルが届く限りの範囲で、結構いい感じに構築できた。
途中でオドメトリがわからなくなった時にも、少しカメラの位置を戻してあげると、そこから認識して、再度構築が始まる。
また過去に保存した地図データベースを読み込んでから実行すると、BoWで現在の位置を認識し、その位置から再度地図作成が可能である。