最近、SG90や、MG996R等のサーボを使って色々作っていますが、
ESP8266(NODE MCU)で起動時やプログラム書き込み時に、勝手にサーボが動いてしまうのが厄介だったので、GPIO毎の挙動を調べて一覧化しました。(ニッチかも)
| GPIO | サーボの挙動(起動時やプログラム書き込み時) |
|---|---|
| 0 | 動かない |
| 1 | 動く |
| 2 | 動く |
| 3 | 動く |
| 4 | 動かない |
| 5 | 動かない |
| 12 | 動かない |
| 13 | 動かない |
| 14 | 動かない |
| 15 | 動かない |
| 16 | 動かない |
まとめると、GPIO1~3は、起動時やプログラム書き込み時に勝手にサーボが動いてしまいます。
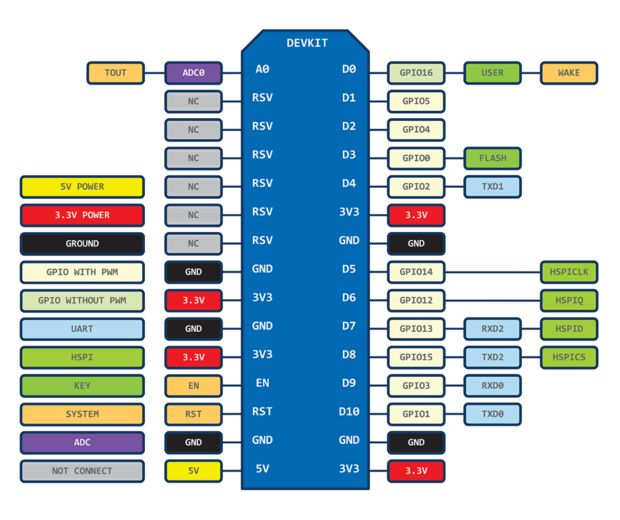
UARTのGPIO1はTXD0、GPIO3はRXD0に繋がっていて、シリアル通信の影響を受けるのは分かるとして、
TXD1のGPIO2で動くのは謎ですね。
PWM出来ないはずのGPIO16でもサーボの制御ができたのも意外でした。