準備したもの
ミニ四駆
モータドライバ:TA7921P
超音波距離センサ:HC-SR04
ロジックレベルコンバータ:BOB-12009
Raspberry Pi Model B+用バニラ基板
5V電源
配線
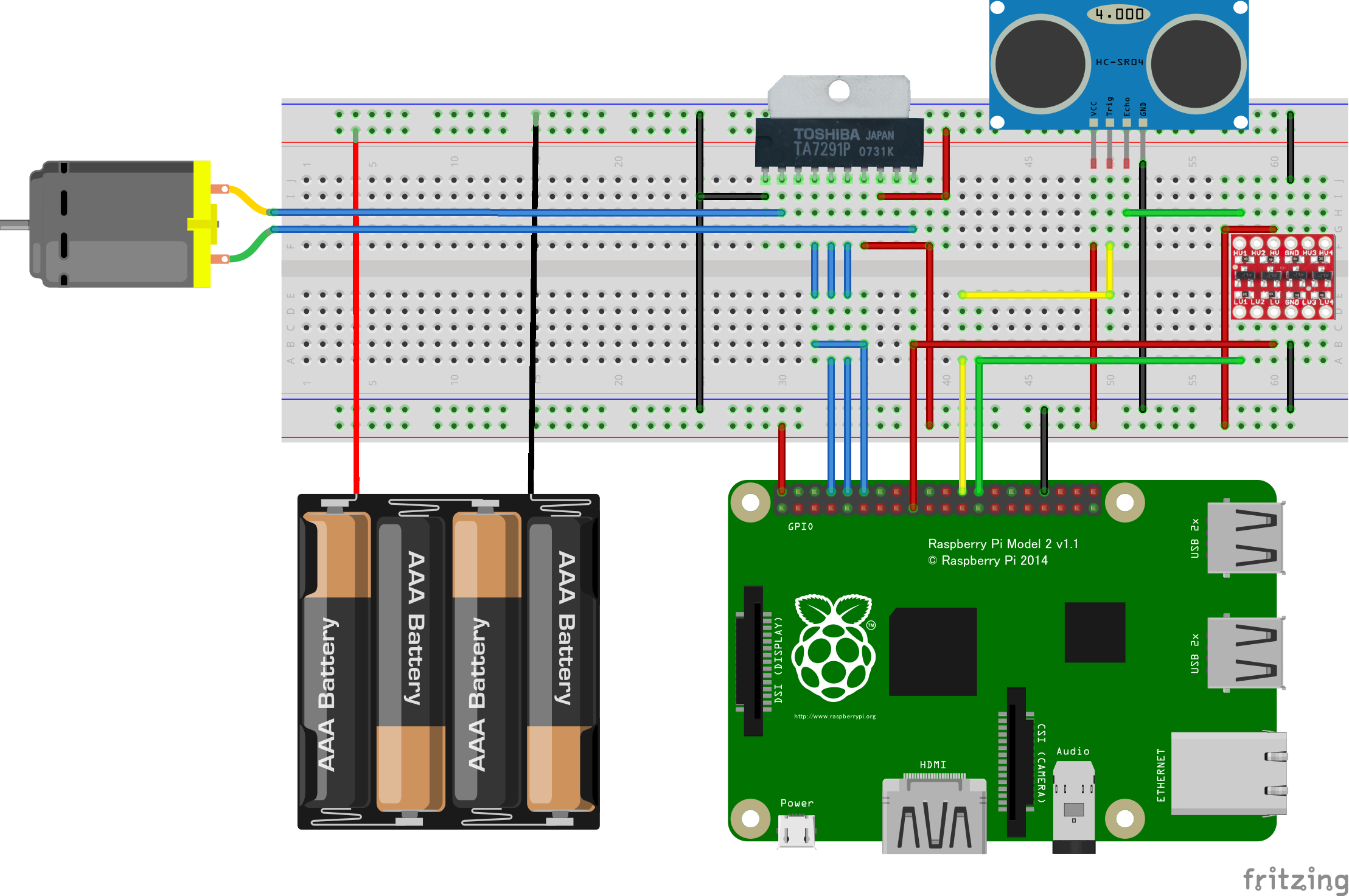
TA7721P
pin1:GND
pin2:モータ
pin4:GPIO18
pin5:GPIO14
pin6:GPIO15
pin7:5v
pin8:vs(今回は5v)
pin10:モータ
HC-SR04
GND:GND
Echo:BOB-12009のHv1
Trig:GPIO8
Vcc:5v
BOB-12009
Hv1:HC-SR04のEcho
Hv:5v
GND:GND
Lv1:GPIO7
Lv:3.3v
GND:GND
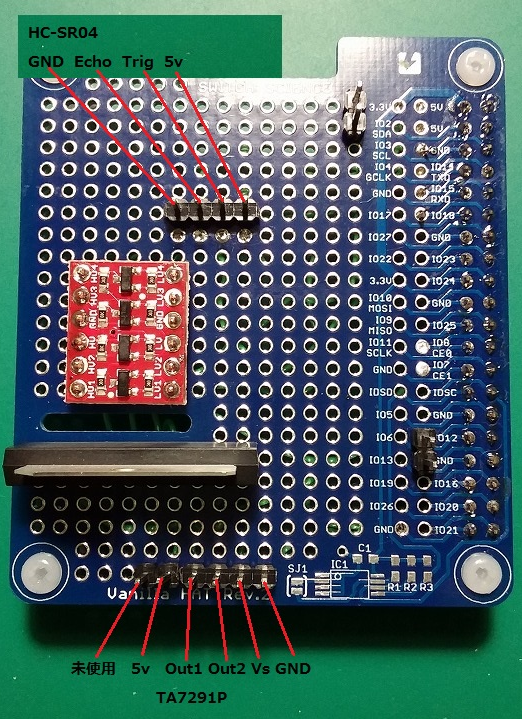
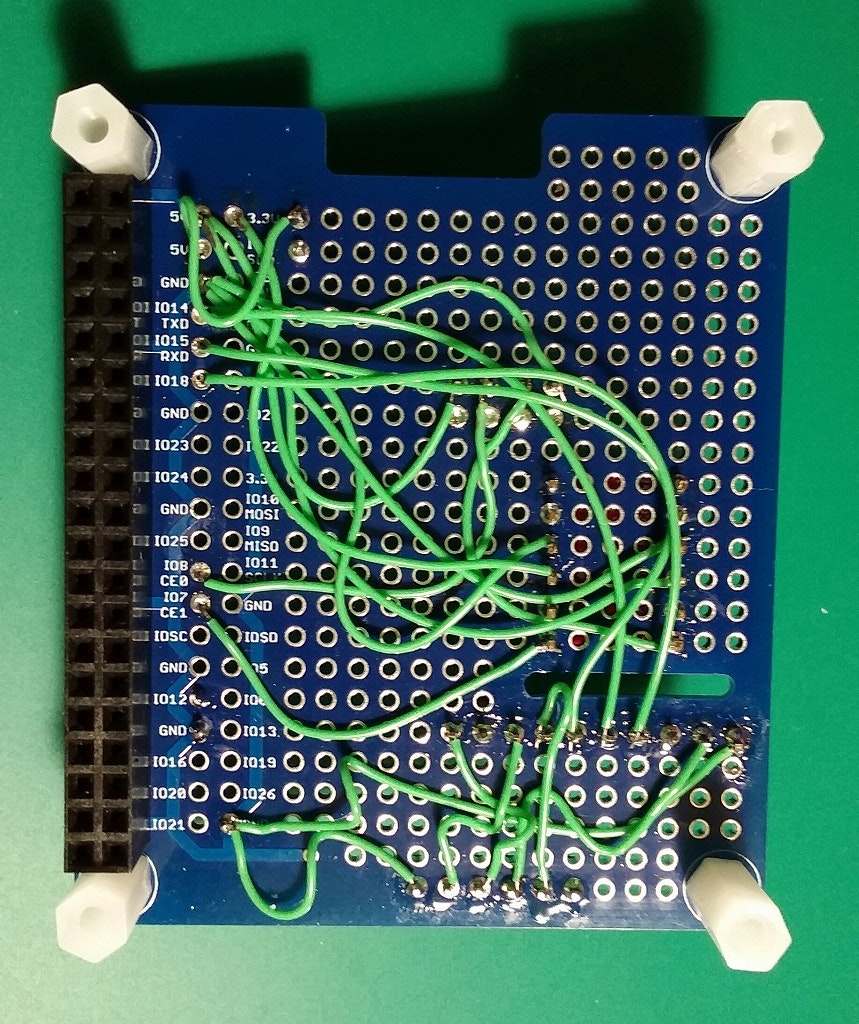
バニラ基板へ実装
表
裏
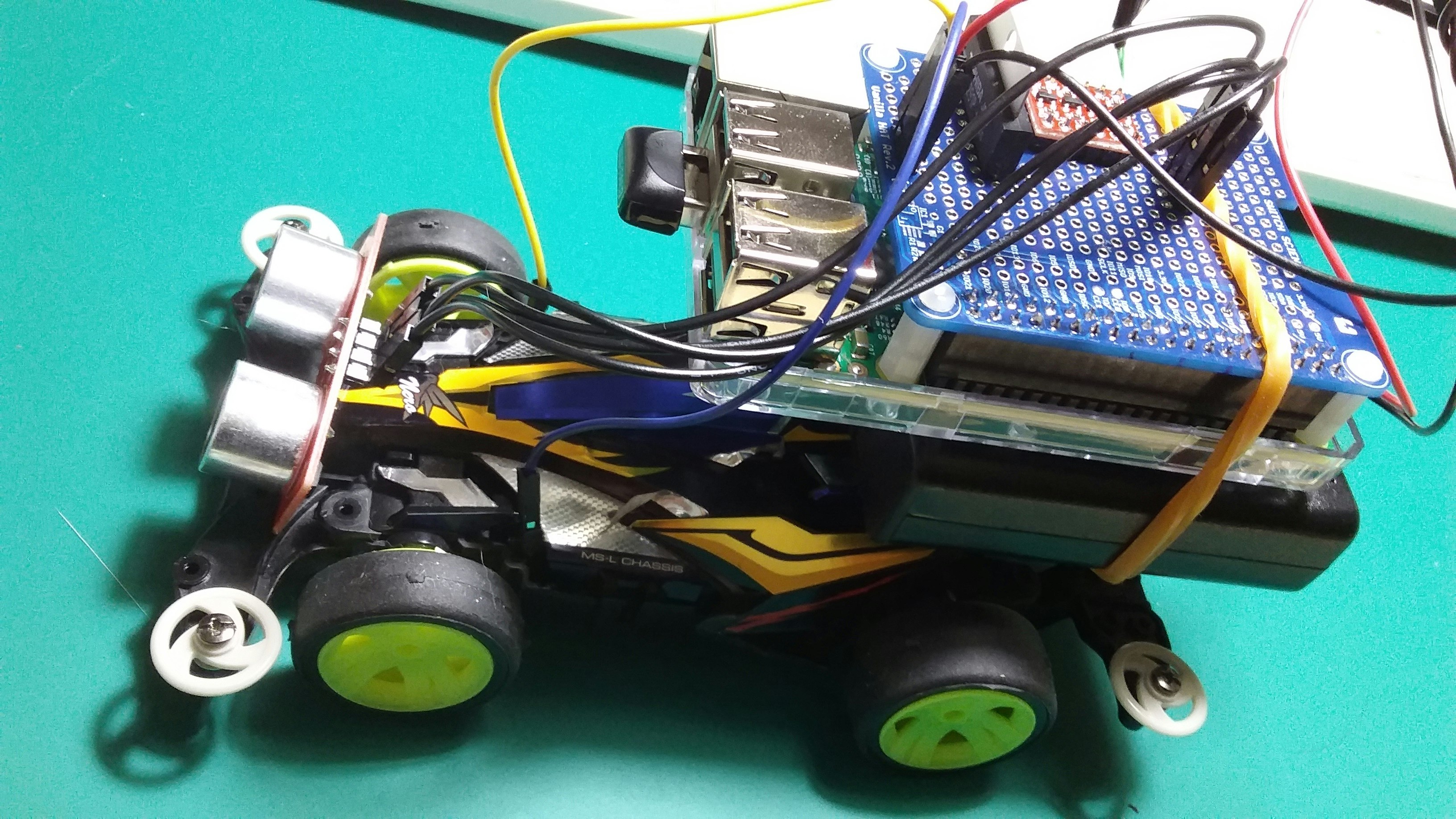
早速ミニ四駆へ実装(重そう。。)
プログラムソースコード(C言語)
前方障害物との距離が151cm以上だと前進し、100cm未満になると停止するプログラム。
main.c
//gcc -Wall -O2 main.c -o main -lwiringPi
# include <stdio.h>
# include <stdlib.h>
# include <wiringPi.h>
# include <unistd.h>
# include <sys/time.h>
//HC-SR04
# define HC_SR04_TRIG_PIN 8
# define HC_SR04_ECHO_PIN 7
//TA7291P
# define TA7291P_MOTOR_FORWARD_PIN 14
# define TA7291P_MOTOR_REVERSE_PIN 15
# define TA7291P_MOTOR_PWM_PIN 18
//#define TA7291P_OUT_POWER 512
# define TA7291P_STOP 0
# define TA7291P_FORWARD 1
# define TA7291P_REVERSE 2
//HC-SR04
void HC_SR04_init(void);
long HC_SR04_get_distance(void);
int HC_SR04_pulseIn(int pin, int level, int timeout);
//TA7291P
int m_nTA7291P_mode;
void TA7291P_init(void);
void TA7291P_forward(int nPower);
void TA7291P_reverse(int nPower);
void TA7291P_stop(void);
/*****************************************************************
*
*****************************************************************/
int main (int argc, char **argv)
{
long distance;
if(wiringPiSetupGpio() == -1){
printf("wiringPiSetupGpio() error\n");
return -1;
}
HC_SR04_init(); //HC-SR04 初期化
TA7291P_init(); //TA7291P 初期化
for(;;){
delayMicroseconds(100000); //wait
distance = HC_SR04_get_distance(); //HC-SR04 距離取得
if(distance >= 150){
if(m_nTA7291P_mode != TA7291P_FORWARD){
TA7291P_forward(512); //TA7291P 正回転開始
}
}
if(distance < 100){
TA7291P_stop(); //TA7291P 停止
}
printf("distance=%ld cm\n",distance);
}
return 0;
}
/*****************************************************************
* HC-SR04 距離取得
*****************************************************************/
long HC_SR04_get_distance(void)
{
long duration, distance;
digitalWrite(HC_SR04_TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(HC_SR04_TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(HC_SR04_TRIG_PIN, LOW);
duration = HC_SR04_pulseIn(HC_SR04_ECHO_PIN, HIGH, 1000000);
// printf("duration=%d\n",duration);
distance = (duration/2) / 29.1;
// printf("distance=%d cm\n",distance);
return distance;
}
/*****************************************************************
* HC-SR04 初期化
*****************************************************************/
void HC_SR04_init(void)
{
pinMode(HC_SR04_TRIG_PIN,OUTPUT);
pinMode(HC_SR04_ECHO_PIN,INPUT);
}
/*****************************************************************
* HC-SR04 パルス波時間を取得する
*****************************************************************/
int HC_SR04_pulseIn(int pin, int level, int timeout)
{
struct timeval tn, t0, t1;
long micros;
gettimeofday(&t0, NULL);
micros = 0;
while (digitalRead(pin) != level){
gettimeofday(&tn, NULL);
if (tn.tv_sec > t0.tv_sec){
micros = 1000000L;
}
else{
micros = 0;
}
micros += (tn.tv_usec - t0.tv_usec);
if (micros > timeout) return 0;
}
gettimeofday(&t1, NULL);
while (digitalRead(pin) == level){
gettimeofday(&tn, NULL);
if (tn.tv_sec > t0.tv_sec){
micros = 1000000L;
}
else{
micros = 0;
}
micros = micros + (tn.tv_usec - t0.tv_usec);
if (micros > timeout) return 0;
}
if (tn.tv_sec > t1.tv_sec) micros = 1000000L; else micros = 0;
micros = micros + (tn.tv_usec - t1.tv_usec);
return micros;
}
/*****************************************************************
* TA7291P 初期化
*****************************************************************/
void TA7291P_init(void)
{
m_nTA7291P_mode = TA7291P_STOP;
pinMode(TA7291P_MOTOR_FORWARD_PIN, OUTPUT);
pinMode(TA7291P_MOTOR_REVERSE_PIN, OUTPUT);
pinMode(TA7291P_MOTOR_PWM_PIN, PWM_OUTPUT);
TA7291P_stop(); //TA7291P 停止
}
/*****************************************************************
* TA7291P 正回転
* nPower:0.. 回転速度(0が停止)
*****************************************************************/
void TA7291P_forward(int nPower)
{
if(m_nTA7291P_mode == TA7291P_REVERSE){
TA7291P_stop(); //TA7291P 停止
delayMicroseconds(50000); //wait(50ms)
}
m_nTA7291P_mode = TA7291P_FORWARD;
digitalWrite(TA7291P_MOTOR_FORWARD_PIN, HIGH);
pwmWrite(TA7291P_MOTOR_PWM_PIN, nPower);
}
/*****************************************************************
* TA7291P 逆回転
* nPower:0.. 回転速度(0が停止)
*****************************************************************/
void TA7291P_reverse(int nPower)
{
if(m_nTA7291P_mode == TA7291P_FORWARD){
TA7291P_stop(); //TA7291P 停止
delayMicroseconds(50000); //wait(50ms)
}
m_nTA7291P_mode = TA7291P_REVERSE;
digitalWrite(TA7291P_MOTOR_REVERSE_PIN, HIGH);
pwmWrite(TA7291P_MOTOR_PWM_PIN, nPower);
}
/*****************************************************************
* TA7291P 停止
*****************************************************************/
void TA7291P_stop(void)
{
m_nTA7291P_mode = TA7291P_STOP;
pwmWrite(TA7291P_MOTOR_PWM_PIN, LOW);
digitalWrite(TA7291P_MOTOR_FORWARD_PIN, LOW);
digitalWrite(TA7291P_MOTOR_REVERSE_PIN, LOW);
}
動作テスト動画(YouTube)
前方障害物が10cm未満だと停止。20cm以上になると走行

動作テストはうまくいったが。。
やはり、車体が重すぎて走りませんでした。
バッテリ軽量化で走りそうなのですが、次回はもっと電流が流せるモータとドライバで実験します。