目的
ROSでKinect V2を使う方法について。
libfreenect2/iai_kinect2をソースからコンパイルする。
環境
Ubuntu x1404 x64
ROS:Indigo
手順
下記のコマンドでインストール。
libfreenect2のインストール
libfreenect2をインストールする。
https://github.com/OpenKinect/libfreenect2
$ mkdir ~/kinectv2
$ cd ~/kinectv2/
$ git clone https://github.com/OpenKinect/libfreenect2.git
$ cd libfreenect2/depends/
$ ./download_debs_trusty.sh
$ sudo dpkg -i debs/libusb*deb
$ sudo apt-get install build-essential cmake pkg-config
$ sudo apt-get install libturbojpeg libjpeg-turbo8-dev
$ cd ..
$ mkdir build && cd build
$ cmake .. -DCMAKE_INSTALL_PREFIX=$HOME/freenect2
$ make
$ make install
下記コマンドで動作確認。画像が取得できればOK。
$ ~/kinectv2/bin/Protonect
iai_kinect2のインストール
iai_kinect2をインストールする。
https://github.com/code-iai/iai_kinect2
$ mkdir ~/catkin_kinectv2/src/ -p
$ cd ~/catkin_kinectv2/src/
$ git clone https://github.com/code-iai/iai_kinect2.git
$ cd iai_kinect2
$ rosdep install -r –from-paths .
$ cd ~/catkin_kinectv2
$ catkin build
.bashrcに以下を追加
$ vi ~/.bashrc
source ~/catkin_kinectv2/devel/setup.bash
下記コマンドで動作確認。画像が取得できればOK。
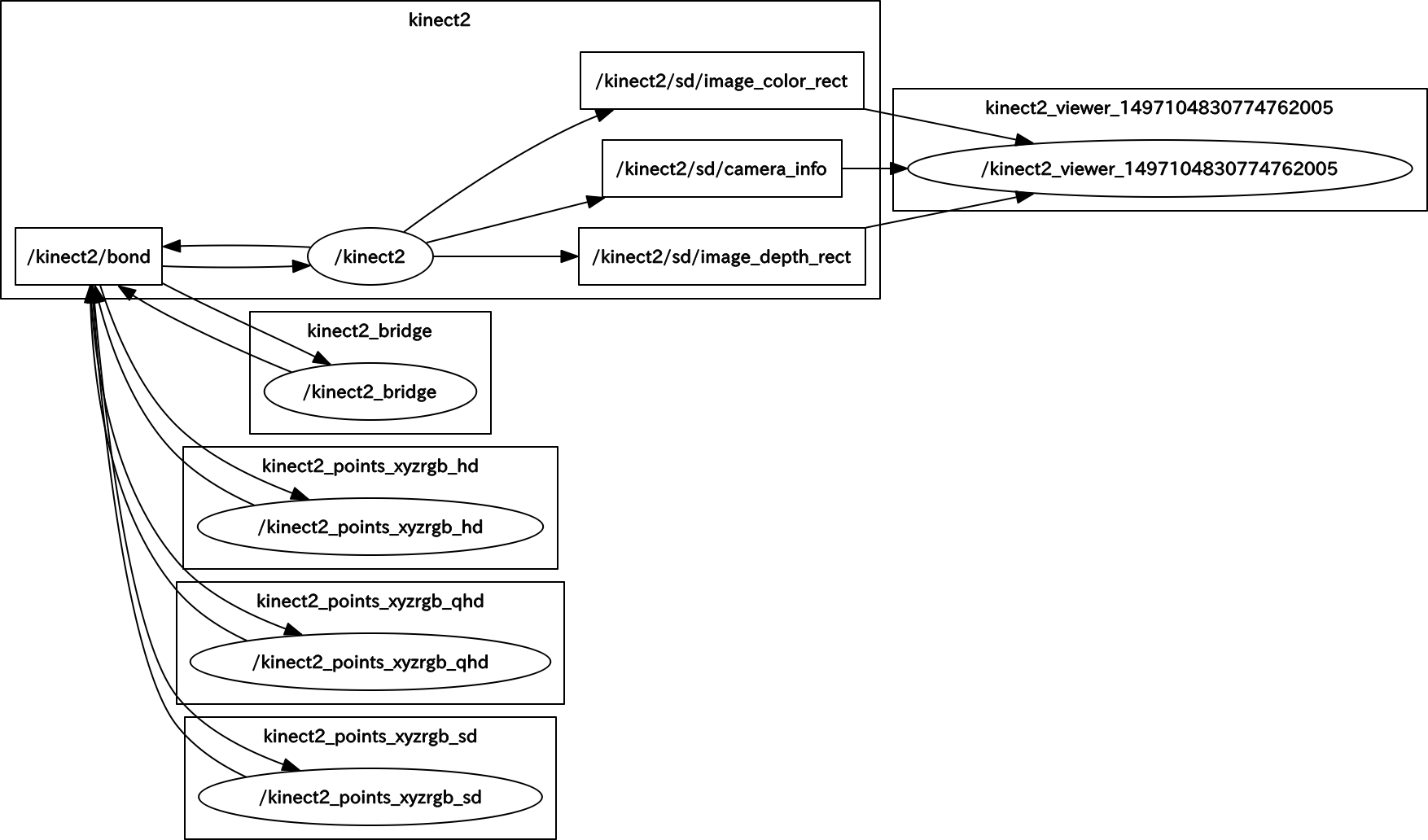
$ roslaunch kinect2_bridge kinect2_bridge.launch
$ rosrun kinect2_viewer kinect2_viewer kinect2 sd cloud
参考
Kinect V2 + Ubuntu14.04 メモ @ demura.net
http://demura.net/athome/13165.html
「KINECT WITH ROS」(ROS勉強会2016.11.17)@ Katsunori Kanda,
https://www.slideshare.net/potix2_jp/kinect-with-ros-69186713