目的
openFrameWorksで作成したアプリケーションからROS通信を行う方法。
PCL_ROSをMakeFileでコンパイルするのやり方に等しい。
openframeworksとは
"「創造的なコーディング」のためのC++のオープンソースツールキット"
http://openframeworks.cc/ja/
強力なアドオンを組み込むことができる。
http://ofxaddons.com/popular
openframeworksのプロジェクト作成
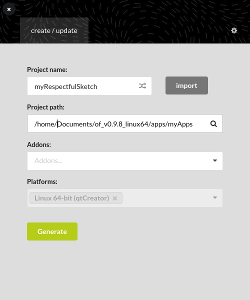
projectGeneratorでプロジェクト作成
Makefileの編集
Makefileとconfig.makeを編集する。
Makefile
Makefileにopenframeworksのルートディレクトリを追記する。
絶対パスを指定するとどのフォルダでもコンパイルすることができるようになる。
ifneq ($(wildcard config.make),)
include config.make
endif
ifndef OF_ROOT
OF_ROOT=$(realpath /home/nnn112358/Documents/of_v0.9.8_linux64/)
endif
include $(OF_ROOT)/libs/openFrameworksCompiled/project/makefileCommon/compile.project.mk
config.make
config.makeにROSとのリンクを記載する。
PROJECT_LDFLAGS=-Wl,-rpath=./libs
PROJECT_LDFLAGS+=$(SUBLIBS) $(ros_libs_nocolon)
ros_libs = $(shell pkg-config --libs roscpp nav_msgs tf)
ros_libs_nocolon = $(subst -l:,,$(ros_libs))
PROJECT_OPTIMIZATION_CFLAGS_DEBUG = `pkg-config --cflags roscpp nav_msgs tf` -w -O2
PROJECT_OPTIMIZATION_CFLAGS_RELEASE = `pkg-config --cflags roscpp nav_msgs tf` -w -O2
ソースの編集
ソースにROSとの通信処理を書く。
ros::initはmainの引数が必要なので、main.cppにros::initを記載し、
初期化処理はofApp::setup()
逐次処理はofApp::update()
に記載する。
main.cpp
#include "ofMain.h"
#include "ofApp.h"
#include <ros/ros.h>
int main(int argc, char *argv[]){
ros::init(argc, argv, "ros_tutorial_msg_publisher"); // ROSノード名の初期化
ofSetupOpenGL(1024,768,OF_WINDOW);
ofApp *app = new ofApp();
ofRunApp(app);
}
ofApp.cpp
void ofApp::setup(){
chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
}
void ofApp::update(){
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << endl;
msg.data = ss.str();
ROS_INFO("%s", msg.data.c_str());
chatter_pub.publish(msg);
ros::spinOnce();
}