目的
googleがリリースした、ROSに対応している。SLAMライブラリCartographerをつかって、地図を作成する。
ロボットなしでも動かすために、ROSのシミュレーション環境Gazeboを使用する。
Fetchには、シミュレーション用のgazeboモデルと、Cartographerの設定ファイルが準備されていることから、Fetchのモデルを使用する。
1.シミュレーション環境の構築
gazeboでの移動ロボットのシミュレーション環境を構築する。
FetchのシミュレーションモデルにはSLAMに必要なセンサー:Lidarを含んでいる。
<参考>Fetch & Freight Manual:
http://docs.fetchrobotics.com/index.html
下記コマンドでインストールする。
$ sudo apt-get update
$ sudo apt-get install ros-indigo-fetch-gazebo-demo
下記コマンドでGazeboをたちあげて、ロボットが走行できることを確認する。
teleopのコンソールで、U/I/Oキーなどで走行させることができる。
gazeboは初回起動時にかなり時間がかかる。起動するまで、しばらく放っておく。(固まっているように見えるが起動中である。)
$ roslaunch fetch_gazebo simulation.launch
$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
2.cartographerのインストール
ここで、Fetch用のcartographerを、ドキュメントにしたがって、インストールする。
https://github.com/googlecartographer/cartographer_fetch/blob/master/docs/source/index.rst
# Install wstool and rosdep.
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build
# Create a new workspace in 'catkin_ws'.
mkdir catkin_ws
cd catkin_ws
wstool init src
# Merge the cartographer_fetch code for dependencies.
wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_ros/master/cartographer_ros.rosinstall
wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_fetch/master/cartographer_fetch.rosinstall
wstool update -t src
# Install deb dependencies.
rosdep update
rosdep install --from-paths src --ignore-src -r --rosdistro=${ROS_DISTRO} -y
# Build and install.
catkin_make_isolated --install --use-ninja
source install_isolated/setup.bash
<参考>Cartographer ROS Integration:https://google-cartographer-ros.readthedocs.io/en/latest/
サンプルのROSBAGを実行して、動作することを確認する。
# Download the 2D example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/fetch/cartographer_freight_simulation_demo.bag
# Launch the 2D demo.
roslaunch cartographer_fetch demo.launch bag_filename:=${HOME}/Downloads/cartographer_freight_simulation_demo.bag
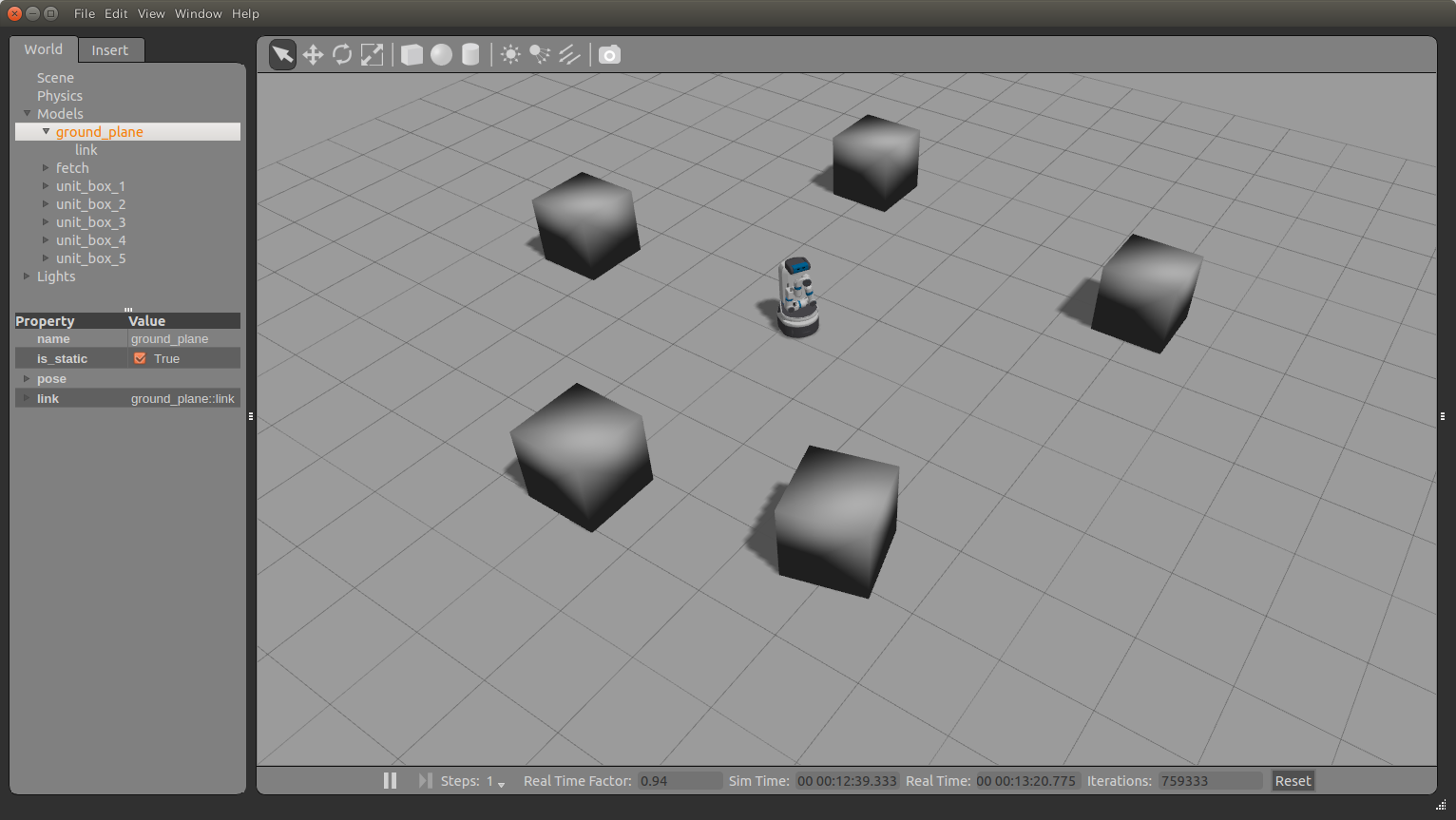
3.Gazeboでのシミュレーション
gazeboを起動
$ roslaunch fetch_gazebo simulation.launch
適当に、障害物をおいていく。障害物がないと、SLAMを実行することができない。
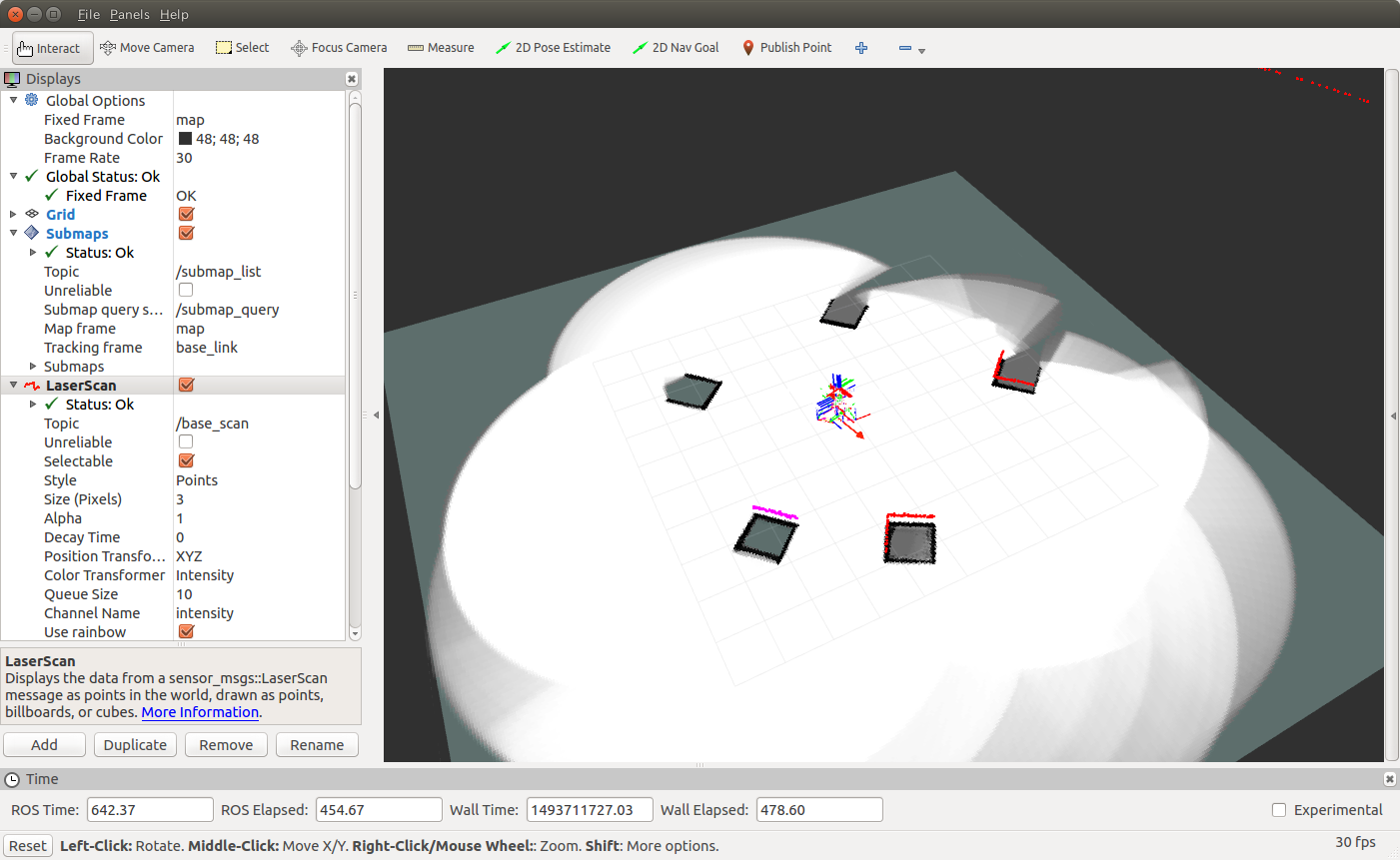
fetch用のCartographerを起動する。
$ roslaunch cartographer_fetch freight.launch
teleopとrvizを起動、U/I/Oキーなどで走行させながら地図ができていく様子を観察する。
$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
$ rosrun rviz rviz
参考
Real-Time Loop Closure in 2D LIDAR SLAM
https://research.google.com/pubs/pub45466.html
Ros wiki
http://wiki.ros.org/cartographer