###目的
ROSのRGBD-SLAMパッケージRGBDTAMを動かしてみた。
RGBDTAMは、CPUでリアルタイムで動作する、LowCostなSLAMパッケージ、とのこと。
github:https://github.com/alejocb/rgbdtam
Publication:RGBDTAM: A cost-effective and accurate RGBD Tracking and Mapping System
###環境
Ubuntu:14.04 x64
ROS:indigo
(ROS:Kinetic branchあるが、私の環境で動作せず https://github.com/alejocb/rgbdtam/pull/7)
###PCL1.7.2のインストール
ROS indigoはPCL1.7.1なのでPCL1.7.2以上にする必要がある。
sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl
sudo apt-get update
sudo apt-get dist-upgrade
###必要なライブラリをインストールする。
sudo apt-get install libboost-all-dev
sudo apt-get install libsuitesparse-dev
sudo apt-get install libblas-dev
sudo apt-get install liblapack-dev
sudo apt-get install libeigen3-dev
###catkin_rgbdtamのインストール
$ mkdir ~/catkin_rgbdtam/src -p
$ cd ~/catkin_rgbdtam/src/
$ git clone https://github.com/alejocb/rgbdtam.git
$ cd rgbdtam/
$ chmod +x build_thirdparty.sh
$ ./build_thirdparty.sh
$ cd ..
$ catkin_make rgbdtam -j3
###設定ファイルのインストール
https://github.com/raulmur/ORB_SLAM/tree/master/Data
からORBvoc.txt.tar.gzをダウンロード
~/catkin_rgbdtam/src/rgbdtam/ThirdParty/DBoW2に設置する。
$ cd ~/catkin_rgbdtam/src/rgbdtam/ThirdParty/DBoW2
$ tar xvfz ORBvoc.txt.tar.gz
###データセットの準備
cd ~/catkin_rgbdtam/
wget http://vision.in.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.bag
rosbag filter rgbd_dataset_freiburg3_long_office_household.bag new_office_household.bag "topic=='/camera/rgb/image_color' or topic == '/camera/depth/image'"
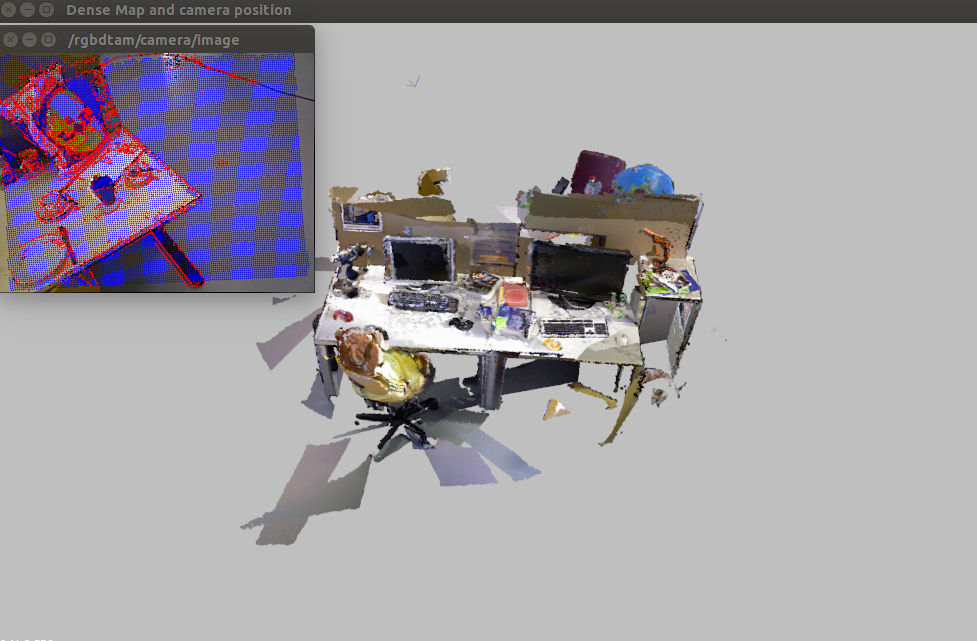
###サンプルの実行
roscore実行の上、コンソールを3つ立ち上げ、rgbdtamを実行。
rosbag play new_office_household.bag
rosrun rgbdtam rgbdtam
rosrun image_view image_view image:=/rgbdtam/camera/image
###KinectV1で実行
freenectのインストール
sudo apt-get install ros-indigo-freenect-launch
コンソールを3つ立ち上げ、rgbdtamを実行。
roslaunch freenect_launch freenect.launch
rosrun rgbdtam rgbdtam
rosrun image_view image_view image:=/rgbdtam/camera/image