以下の環境で説明する.
- Windows 8.1
- Visual Studio Community 2013
- OpenCV 3.0
SDKのインストール
以下のウェブページからSDKをダウンロードする.
https://www.microsoft.com/en-us/kinectforwindows/develop/
登録を勧めるダイアログが表示されるが,いずれでもよい.
2015/08/02時点では,KinectSDK-v2.0_1409-Setup.exe が最新バージョンである.
インストーラを実行する前に,Kinectは外しておく.
インストールに関しては,他には特段の解説は必要ないと思われる.順次行えばよい.
インストールが終了したら,Kinectを接続すると,各種ドライバがインストールされる.やや時間がかかるときもあるが気長に待つ.
サンプルなどは以下のフォルダに格納されるので大いに参照するべき.
C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409
実行テスト
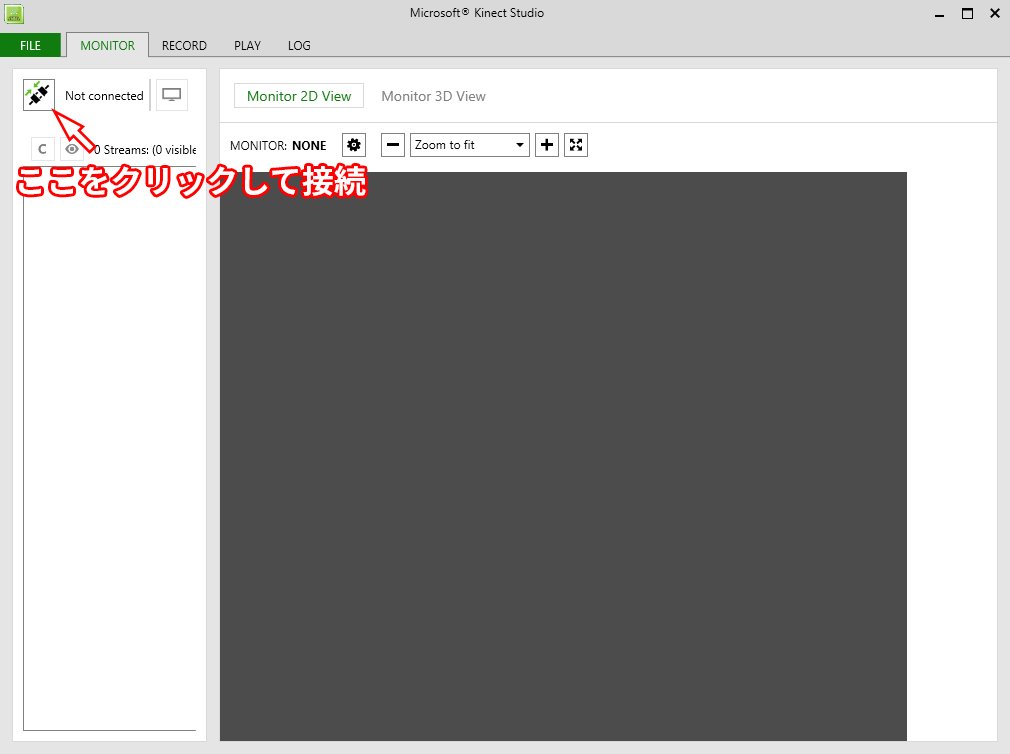
まず,自作のプログラムを作成する前に,Kinect Studio v2.0 を起動してデータが取得できることを確認する.
Win+Q で kinect を検索するなどして,Kinect Studio v2.0 を起動する.
ウィンドウの左上のアイコンをクリックすると,KinectとPCが接続されて距離画像が表示される.
Visual Studio の準備
Visual Studio を用いて C++ のプログラムを開発する場合,各種パスの設定が必要である.
Visual Studio 共通の環境として設定しておく.OpenCVの設定事例に倣い,プロパティシート Microsoft.Cpp.Win32.user あるいは Microsoft.Cpp.x64.user を設定する.プロパティシートの一般的な取り扱いについては,以下を参照されたい.
Visual StudioでOpenCV3.0開発環境を準備する#Visual Studio 2013 の設定
Kinect v2 SDK をインストールすると,環境変数 KINECTSDK20_DIR が C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\ と設定されているので,Visual Studio の設定でもこの環境変数を参照する.$(KINECTSDK20_DIR) と記述すれば参照できる.
追加のインクルードディレクトリには $(KINECTSDK20_DIR)\inc を,追加のライブラリディレクトリには 32ビットバイナリ(Microsoft.Cpp.Win32.user)の場合は $(KINECTSDK20_DIR)\Lib\x86 を,64ビットバイナリ(Microsoft.Cpp.x64.user)の場合は $(KINECTSDK20_DIR)\Lib\x64 を指定する.
また,DLLが見つけられるようにするため,環境変数 Path の末尾にセミコロンで区切って,%KINECTSDK20_DIR%\bin を追加しておく.
kinect20.lib をリンクする必要がある.プロジェクトのプロパティから 構成プロパティ > リンカー > 入力 > 追加の依存ファイル をたどり,kinect20.lib を追加する.