概要
ESP8266 (ESP-WROOM-02) でバスの到着を知ることができる装置を作る
はじめに
「ESP8266 (ESP-WROOM-02) でバスの到着を知る「バスどこメーター」を作る(前篇)」の続きです。
実際の回路を作ります。
設計
- 今回はステッピングモータ(ユニポーラ駆動)を使いました。
- LED だと常に電流を流さないといけないので。
- ステッピングモータは、電流OFFでの静止トルクがとても大きいので、スリープと相性が良い。
- 角度が正確に出せる。
- ステッピングモータについては「ESP8266 (ESP-WROOM-02) でステッピングモータをいい感じに回す」を参照してください。
部品点数を少なくするために、今回はシフトレジスタを使わずに、4つのピンを使って直接制御することにしました。 - 秋月ではステッピングモータは品薄らしい。ユニポーラ駆動はもう無かった。
- しかし、バイポーラ駆動は難しくて制御できなかったorz。(ドライバ付きならできるかもしれない → 今後の課題)
スリープモードのために、IO16 は RST に繋げておきます。
設定は SPIFFS に、モータの位置は EEPROM に保存します。
スケッチ
- 通信してバス位置情報を取得してモーターを回転させた後、再び DeepSleep モードで眠ります。
- json の生成と解析に、ArduinoJson ライブラリを使いました。
使いやすいです。
#include <Esp.h>
#include <ESP8266WiFi.h>
#include <WiFiClient.h>
#include <ESP8266WebServer.h>
#include <FS.h>
#include <EEPROM.h>
#include <ArduinoJson.h>
// アプリ状態
struct APPSTATUS {
int pos;
};
// モード切り替えピン
const int MODE_PIN = 0; // GPIO0
// Wi-Fi設定保存ファイル
const char* settings = "/wifi_settings.txt";
// サーバモードでのパスワード
const String pass = "thereisnospoon";
// モータ制御ピン
const int PIN[] = {14, 12, 13, 5};
// 2相励磁 (4096ステップで2回転)
const int S = 4;
const int steps[S] = {
0b1100,
0b0110,
0b0011,
0b1001
};
ESP8266WebServer server(80);
/**
* アプリ設定
*/
struct APPCONFIG {
String ssid; // WiFi SSID
String pass; // WiFi Password
String HOST; // WEBAPI
String PATH; // WEBAPI
String DSMK; // 乗車バス停
String ASMK; // 降車バス停
};
void getAppConfig(APPCONFIG& config) {
File f = SPIFFS.open(settings, "r");
config.ssid = f.readStringUntil('\n');
config.pass = f.readStringUntil('\n');
config.HOST = f.readStringUntil('\n');
config.PATH = f.readStringUntil('\n');
config.DSMK = f.readStringUntil('\n');
config.ASMK = f.readStringUntil('\n');
f.close();
config.ssid.trim();
config.pass.trim();
config.HOST.trim();
config.PATH.trim();
config.DSMK.trim();
config.ASMK.trim();
Serial.println("SSID: " + config.ssid);
Serial.println("PASS: " + config.pass);
Serial.println("HOST: " + config.HOST);
Serial.println("PATH: " + config.PATH);
Serial.println("DSMK: " + config.DSMK);
Serial.println("ASMK: " + config.ASMK);
}
void handleRootGet() {
APPCONFIG config;
getAppConfig(config);
String html = "";
html += "<h1>WiFi Settings</h1>";
html += "<form method='post'>";
html += " <table>";
html += " <tr><td>ssid</td><td><input type='text' name='ssid' placeholder='ssid' value='" + config.ssid + "'></td></tr>";
html += " <tr><td>pass</td><td><input type='text' name='pass' placeholder='pass' value='" + config.pass + "'></td></tr>";
html += " <tr><td>HOST</td><td><input type='text' name='HOST' placeholder='HOST' value='" + config.HOST + "'></td></tr>";
html += " <tr><td>PATH</td><td><input type='text' name='PATH' placeholder='PATH' value='" + config.PATH + "'></td></tr>";
html += " <tr><td>DSMK</td><td><input type='text' name='DSMK' placeholder='DSMK' value='" + config.DSMK + "'></td></tr>";
html += " <tr><td>ASMK</td><td><input type='text' name='ASMK' placeholder='ASMK' value='" + config.ASMK + "'></td></tr>";
html += " </table>";
html += " <input type='submit'>";
html += "</form>";
server.send(200, "text/html", html);
}
void handleRootPost() {
String ssid = server.arg("ssid");
String pass = server.arg("pass");
String HOST = server.arg("HOST");
String PATH = server.arg("PATH");
String DSMK = server.arg("DSMK");
String ASMK = server.arg("ASMK");
File f = SPIFFS.open(settings, "w");
f.println(ssid);
f.println(pass);
f.println(HOST);
f.println(PATH);
f.println(DSMK);
f.println(ASMK);
f.close();
String html = "";
html += "<h1>WiFi Settings</h1>";
html += ssid + "<br>";
html += pass + "<br>";
html += HOST + "<br>";
html += PATH + "<br>";
html += DSMK + "<br>";
html += ASMK + "<br>";
server.send(200, "text/html", html);
}
// モータ制御
void out(int x) {
for (int i = 0; i < 4; i++) {
digitalWrite(PIN[i], (x >> i) & 1 ? HIGH : LOW);
}
}
// リクエスト送信
String postData(String host, int port, String path, String json) {
String data = "";
data += "POST " + path + " HTTP/1.1\r\n";
data += "Host: " + host + "\r\n";
data += "Connection: close\r\n";
data += "Content-Type: application/json;\r\n";
data += "Content-Length: " + String(json.length()) + "\r\n";
data += "\r\n";
data += json;
Serial.println(data);
WiFiClient client;
if (client.connect(host.c_str(), port)) {
Serial.println("Connection success!!!");
client.print(data.c_str());
delay(10);
String response = client.readString();
int bodypos = response.indexOf("\r\n\r\n") + 4;
return response.substring(bodypos);
} else {
Serial.println("Connection failed");
client.stop();
return "";
}
}
const int RANGE = 2048;
/**
* 保存した値を取得して、新しい値を保存する
*/
int EEPROM_pos_update(int newPos) {
APPSTATUS buf;
EEPROM.begin(100);
EEPROM.get<APPSTATUS>(0, buf);
int nowPos = buf.pos;
buf.pos = newPos;
EEPROM.put<APPSTATUS>(0, buf);
EEPROM.commit();
return nowPos;
}
void drive(int P_now, int P_ref) {
// モーター制御
while (true) {
int d = P_ref - P_now;
if (d == 0) break;
// P_ref に近づくように ±1 する
P_now += d / abs(d);
// P_now にするには、どの方向に回せばよいか
int i = (P_now + RANGE) % S;
out(steps[i]);
delay(20);
}
// 電流OFF
out(0);
}
/**
* 初期化(クライアントモード)
*/
void setup_client() {
APPCONFIG config;
getAppConfig(config);
WiFi.begin(config.ssid.c_str(), config.pass.c_str());
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
// 情報取得
StaticJsonBuffer<200> reqBuffer;
JsonObject& reqRoot = reqBuffer.createObject();
reqRoot["DSMK"] = config.DSMK;
reqRoot["ASMK"] = config.ASMK;
String json;
reqRoot.printTo(json);
String buff = postData(config.HOST, 80, config.PATH, json);
// レスポンスのJSONをパース
StaticJsonBuffer<1024> resBuffer;
JsonObject& root = resBuffer.parseObject(buff);
JsonArray& item = root["item"].asArray();
int i;
for (i = 0; i < 6; i++) {
const char* route = item[i][0]["route"];
Serial.print(" i : ");
Serial.print(i);
Serial.println(route);
if (route != 0) break;
}
// サーバはバスの位置を配列[0]〜[6]で返す
// 360度を16分割して、[3]の位置を鉛直方向にする
int P_ref = (i - 3) * 2048 / 16;
// EEPROMから現在の値を取得して、新しい値を保存する
int P_now = EEPROM_pos_update(P_ref);
// モーター制御
drive(P_now, P_ref);
// 待ち時間を調整する
(i + 1) * 20;
// 10秒間 眠りにつく
ESP.deepSleep(10 * 1000 * 1000);
}
/**
* 初期化(サーバモード)
*/
void setup_server() {
byte mac[6];
WiFi.macAddress(mac);
String ssid = "";
for (int i = 0; i < 6; i++) {
ssid += String(mac[i], HEX);
}
Serial.println("SSID: " + ssid);
Serial.println("PASS: " + pass);
/* You can remove the password parameter if you want the AP to be open. */
WiFi.softAP(ssid.c_str(), pass.c_str());
server.on("/", HTTP_GET, handleRootGet);
server.on("/", HTTP_POST, handleRootPost);
server.begin();
Serial.println("HTTP server started.");
}
/**
* 初期化
*/
void setup() {
Serial.begin(115200);
Serial.println();
// 1秒以内にMODEを切り替える
// 0 : Server
// 1 : Client
delay(1000);
// ファイルシステム初期化
SPIFFS.begin();
// PIN
for (int i = 0; i < 4; i++) {
pinMode(PIN[i], OUTPUT) ;
}
pinMode(MODE_PIN, INPUT);
if (digitalRead(MODE_PIN) == 0) {
// サーバモード初期化
setup_server();
} else {
// クライアントモード初期化
setup_client();
}
}
void loop() {
server.handleClient();
// 0補正する
if (0 < Serial.available()) {
delay(10);
String buff = "";
while (0 < Serial.available()) {
char ch = Serial.read();
if (ch == '\n') {
// EEPROMから現在の値を取得して、新しい値を保存する
int P_now = EEPROM_pos_update(0);
int d = atoi(buff.c_str());
int P_ref = P_now + d;
Serial.print(" now:");
Serial.print(P_now);
// モーター制御
drive(P_now, P_ref);
Serial.println(d);
break;
} else if ('0' <= ch && ch <= '9' || ch == '-') {
// ASCII文字コード
buff += ch;
}
}
}
}
Githubにアップロードしておきます。
https://github.com/exabugs/BusNavi
回路図
だいたい http://qiita.com/exabugs/items/8077885ce0e6f72597fe と同じ。
(upverter でちゃんと書きなおしたらUPします。)
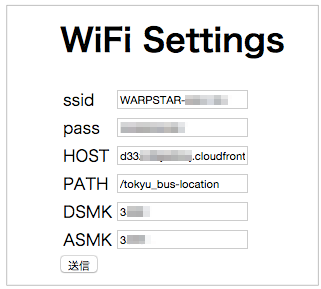
設定
ネットワーク設定
パスワードやバス停IDを、後からブラウザで設定できるように「ESP8266 (ESP-WROOM-02) でWi-Fi使用時のSSID/パスワードをブラウザで設定できるように」で作成したコードを流用します。
- サーバモードで起動 (リセット押下後、1秒以内にモードボタン(IO0)を押下)
- WROOM02 が アクセスポイントとなるので、そのネットワークにPCで接続する。
- ブラウザで 192.168.4.1 に接続
- あなたのネットワークのSSID/Passwordと、前編で作成した APIGatewary(CloudFlont) の ホスト/パス、また、東急バスナビの乗車/降車バス停のIDを入力して保存する。
- リセットボタンを押下して、クライアントモードで起動。
設定画面
ステッピングモータ設定
- 最初に、モータの初期位置を 0 アジャストしないといけない。(位置がわからないので。)
- サーバモードで起動している時に、シリアルから数字を入力すると、0 アジャストできるようにしている。
- 時計で 12時 (鉛直上方向) を 0 とする。そこを矢印が刺すように、100 とか -50 とかシリアルから入力して、0 アジャストする。
動作確認
部品数は意外と少ない。WROOM02 と トランジスタアレイ(シンクドライバ)、モータ。
青い下敷きはモバイルブースターです。(ElasticSearchのセミナーでもらった)
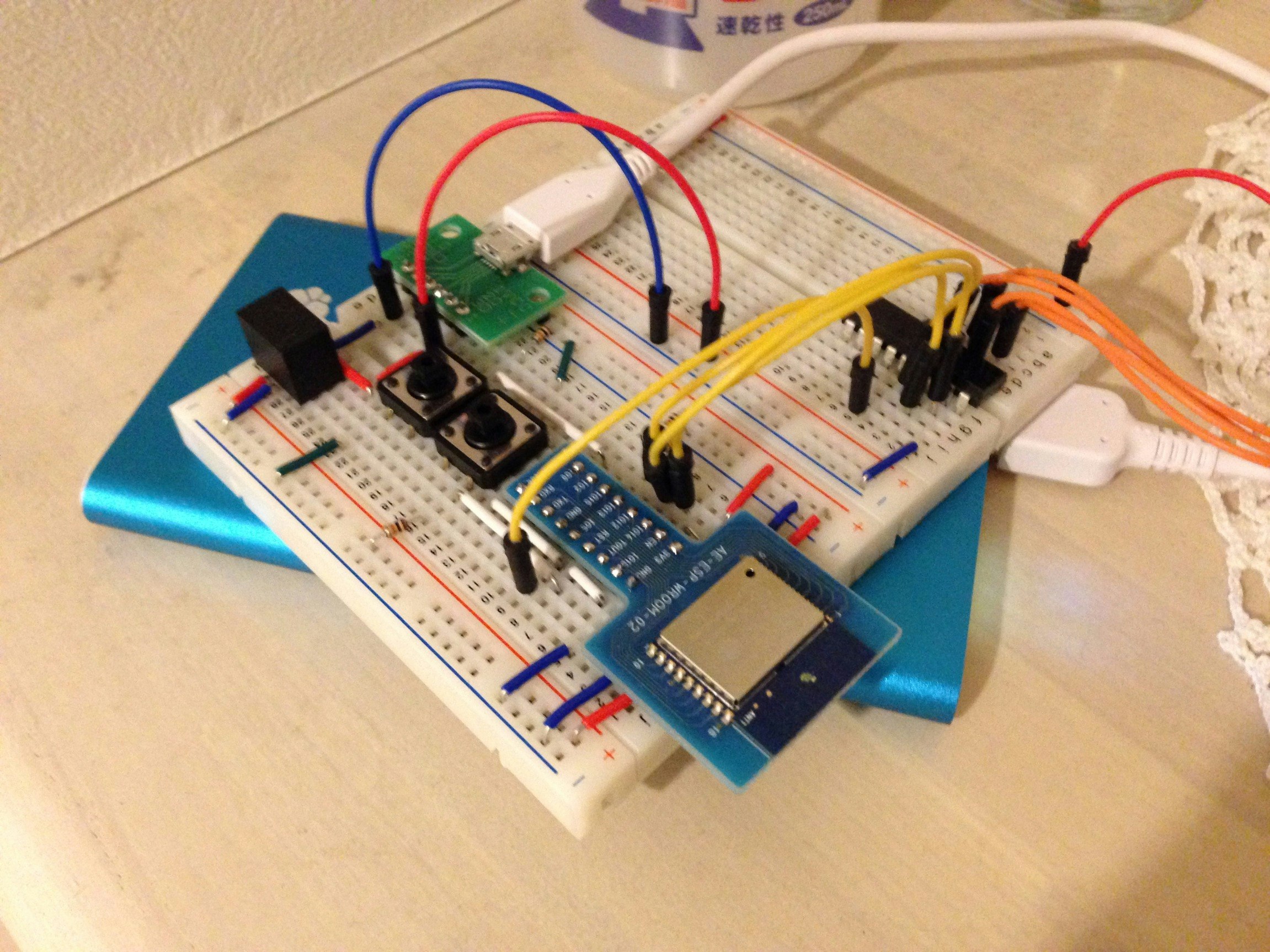
バスは、まだ遠くにいる。

バスが来たらこんな感じ。今、ひとつ前のバス停。

まとめ
- スリープ 10秒 で情報取得してるが、やりすぎた。バスが遠いなら、2分くらいはスリープしてもいいだろう。
- しかも、朝だけ、動いていればいい。いやむしろ、人感センサーと繋げるべきか。
- それでも、やっと、IoT らしくなってきた。
- 我が家の最寄りのバス停は3つある。物理スイッチで切り替えられるようにしたい。