カメラについて基本的に理解している人の復習用。
世界座標系で表された3次元点を画像上にマップにする方法の理論部分。
OpenCVの説明
http://docs.opencv.org/3.0-beta/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html
世界座標系で表された[Xw, Yw, Zw]は、カメラの外部パラメータによって[Xc, Yc, Zc]になる(カメラ座標系)。
これが、カメラの内部パラメータによって、[u, v]になる。(下の式と記号は違います。)
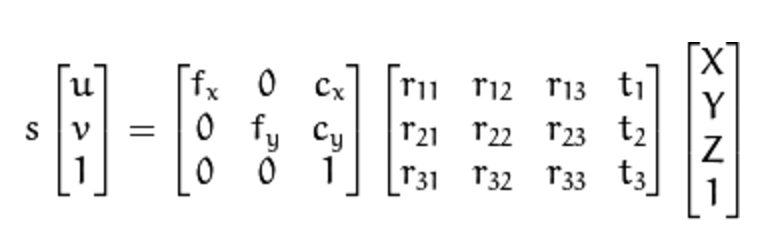
別の書き方をすると、以下のようになる。

ただ、この[u, v]は歪みを考慮していない。
つまり、ここまではundistortedなイメージの話。理想的なピンホールモデル。
実際はレンズを使っているので、この[u, v]の位置が歪む。
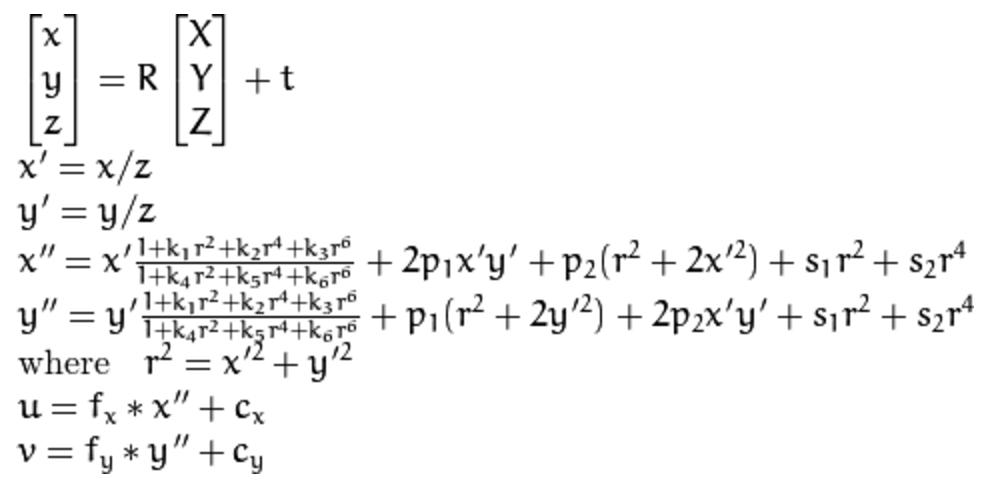
これが、カメラの外部パラメータ、内部パラメータ、歪み係数を使って、
世界座標系で表された3次元点を画像上にマップにする方法の理論部分。
undistortはこの歪みを取るだけなので、undistortしたとしてもCameraMatrixは変わらない。
(opencvなどのundistortで、newCameraMatrixに元のCameraMatrixを入れた場合)